
基本介紹
通常自動控制系統只能在生產工藝正常時進行工作,一旦生產處於事故狀態,控制器就要改為手動,待事故排除後,控制系統再重新投入工作。在大型生產工藝過程中,除了要求控制系統在生產處於正常狀態時能夠克服外界干擾,平穩操作外,還必須考慮在事故狀態下也能安全生產,即當生產操作達到安全極限時,應有保護性措施。
生產保護性措施有兩類:一類是硬保護措施;一類是軟保護措施。所謂硬保護措施,就是當生產操作達到安全極限時,會發出聲、光警報。此時由操作工將控制器切換到手動,進行手動操作處理;或是通過專門設定的連鎖保護線路實現自動停車,達到保護生產的目的。對於連續生產過程來說,即使短暫的設備停車,也會造成巨大的經濟損失,因此這種硬保護措施已經逐漸被軟保護措施所替代。軟保護措施就是通過一個特定設計的選擇性控制系統,在生產短期內處於不正常情況時,生產設備不需要停車,由選擇性控制系統自動改變操作方式,使參數脫離極限值,並且當參數恢復正常時,原控制系統自動恢復,避免停車,而且無需人的參與就可恢復正常生產。
要構成選擇性控制,生產操作必須具有一定的選擇性邏輯關係。而選擇性控制的實現則需要靠具有選擇功能的自動選擇器(高值選擇器和低值選擇器)或有關的切換裝置(切換器、帶接點的控制器或測量裝置)完成。
選擇性控制系統原理及結構
選擇性控制系統是把生產過程中的限制條件所構成的邏輯關係,疊加到正常的自動控制系統上去的一種組合控制方法。系統中設有兩個控制器(調節器或兩個以上的變送器),通過(高、低值)選擇器選出能適應生產安全狀況的控制信號,實現對生產過程的自動控制。正常情況下當生產過程趨近於危險極限區,但還未進入危險區時,一個用於控制不安全情況的控制方案通過高、低值選擇器將取代正常生產情況下工作的控制方案(正常調節器處於開環狀態),用取代調節器代替正常調節器,直至使生產過程重新恢復正常。然後,又通過選擇器使原來的控制方案重新恢復工作,用正常調節器代替取代調節器。因而這種選擇性控制系統又被稱為自動保護系統,或稱為軟保護系統。
因此,設計選擇性控制系統的關鍵環節是採用了選擇器。選擇器可以接在兩個或多個調節器的輸出端,對控制信號進行選擇;或者接在幾個變送器的輸出端,對測量信號進行選擇,以適應不同生產過程的需要。
根據選擇器在系統結構中的位置不同,選擇性控制系統可分為兩種:
 選擇性控制
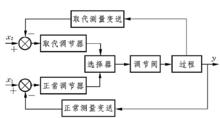
選擇性控制1、選擇器位於調節器的輸出端,對調節器輸出信號進行選擇的系統,如右圖所示,這種選擇性控制系統的主要特點是:兩個調節器共用一個調節閥。在生產正常情況下,兩個調節器的輸出信號同時送至選擇器,選出正常調節器輸出的控制信號送給調節閥,實現對生產過程的自動控制。此時取代調節器處於開路狀態,對系統不起控制作用。當生產不正常時,通過選擇器選出取代調節器代替正常調節器對系統進行控制。此時,正常調節器處於開路狀態,對系統不起控制作用。當系統的生產情況恢復正常,通過選擇器的自動切換,仍由原正常調節器來控制生產的正常進行。這種選擇性控制系統,在現代工業生產過程中得到了廣泛套用。
 選擇性控制
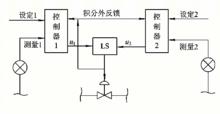
選擇性控制2、選擇器位於調節器之前,對變送器輸出信號進行選擇的系統,如右圖所示。該選擇性系統的特點是幾個變送器合用一個調節器。通常選擇的目的有兩個,其一是選出最高或最低測量值;其二是選出可靠測量值。如固定床反應器中,為了防止溫度過高燒壞催化劑,在反應器的固定催化劑床層內的不同位置上,裝設了幾個溫度檢測點,各點溫度檢測信號通過高值選擇器,選出其中最高的溫度檢測信號作為測量值,進行溫度自動控制,從而保證了反應器催化劑層的安全。
防積分飽和的方法
由於選擇性控制系統中總有一台控制器處於開環狀態,因此易產生積分飽和。防積分飽和有限幅法、外反饋法、積分切除法三種。
1、限幅法:用高低值限幅器將控制器的積分反饋信號限定在某個區域。
2、外反饋法:在控制器開環狀態下,不再使它自身的信號做積分反饋,而是採用合適的外部信號作為積分反饋信號,從而也切斷了積分正反饋,防止了進一步的偏差積分作用。
3、積分切除法:它是從控制器本身的線路結構上想辦法,使控制器積分線路在開環情況下會暫時自動切除,僅具有比例作用,所以這類控制器稱為PI-P控制器。
 選擇性控制
選擇性控制限幅法與外反饋法的防積分飽和原理不一致,功能亦有差別,在套用中應注意它們各自的適用場合。對於選擇性控制系統的防積分飽和,應選擇外反饋法。其積分外反饋信號取自選擇器的輸出信號,如右圖所示。當控制器1處於工作狀態時,選擇器輸出信號等於它自身的輸出信號,而對控制器2來說,這個信號就成為外部積分反饋信號了。反之,亦相同。
值得注意的是,防積分飽和要解決的問題,並非僅僅在於使開環工作的控制器輸出信號不超出有效區間,而且還要求在該控制器的偏差為0的瞬間,其輸出信號與當時工作的控制器輸出信號相同,以便及時替換。
對於一般PI控制器,存在下式:
 選擇性控制
選擇性控制因此控制器1工作時,控制器2的輸出算式為
 選擇性控制
選擇性控制式中:e 為偏差;k為控制器2的比例增益;T為積分反饋時間常數。當e為0,且系統處於較平穩階段時,上述公式為:u=u
從而實現了跟蹤。一旦偏差e反向,控制器2的輸出信號立即會被選上。顯然,若在這裡選用限幅法防積分飽和,則無法起到信號跟蹤作用。
