
工業機器人
常見的工業機器人作業有兩種:
·點位作業(PTP=point-to-point motion)
·連續路徑作業(continuous-path motion),或者稱為輪廓運動(contour motion)。
操作臂最常用的軌跡規劃方法有兩種:
第一種是要求對於選定的軌跡結點(插值點)上的位姿、速度和加速度給出一組顯式約束(例如連續性和光滑程度等),軌跡規劃器從一類函式(例如n次多項式)選取參數化軌跡,對結點進行插值,並滿足約束條件。
第二種方法要求給出運動路徑的解析式。
軌跡規劃既可以在關節空間也可以在直角空間中進行。
 軌跡規劃
軌跡規劃移動機器人
路徑規劃
a.基於模型和基於感測器的路徑規劃
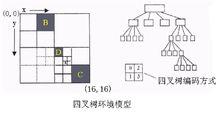
基於模型的方法有:c-空間法、自由空間法、格線法、四叉樹法、矢量場流的幾何表示法等。相應的搜尋算法有A*、遺傳算法等。
 軌跡規劃
軌跡規劃b.全局路徑規劃(GlobalPath Planning)和局部路徑規劃(LocalPath Planning)
自主移動機器人的導航問題要解決的是:
(1)“我現在何處?”;
(2)“我要往何處去?”;
(3)“要如何到該處去?”。
局部路徑規劃主要解決(1)和(3)兩個問題,即機器人定位和路徑跟蹤問題;方法主要有:人工勢場法 、模糊邏輯算法等 。
全局路徑規劃主要解決(2),即全局目標分解為局部目標,再由局部規劃實現局部目標。主要有:可視圖法 、環境分割法(自由空間法 、柵格法 )等 ;
c.離線路徑規劃和線上路徑規劃
離線路徑規劃是基於環境先驗完全信息的路徑路徑規劃。完整的先驗信息只能適用於靜態環境,這種情況下,路徑是離線規劃的;線上路徑規劃是基於感測器信息的不確定環境的路徑規劃。在這種情況下,路徑必須是線上規劃的。
動作規劃
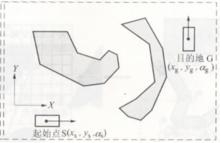
一般來講,移動機器人有三個自由度(X,Y,θ),機械手有6個自由度(3個位置自由度和3個姿態自由度)。因此,移動機器人的動作規劃不是在2個位置自由度(X,Y)構成的2維空間,而是要搜尋位置和姿態構成的3維空間。如圖所示。
 軌跡規劃
軌跡規劃