
超音波電機
 帶有超音波電機的鏡頭
帶有超音波電機的鏡頭英文:ultrasonic motor
由於激振元件為壓電陶瓷,所以也稱為壓電馬達。80年代中期發展起來的超音波電機(Ultrasonic motor,USM)是基於功能陶瓷的超音波頻率的振動實現驅動的新型驅動器。超聲電機是一個典型的機電一體化產品,由電機本體和控制驅動電路兩部分組成。產品涉及到振動學、波動學、材料學、摩擦學、電子科學、計算技術和實驗技術等多個領域。超音波電動機打破了由電磁效應獲得轉速和轉矩的傳統電機的概念。
與傳統電機相比,它具有以下特點與優點:低速大力矩輸出;功率密度高;起停控制性好;可實現直接驅動;可實現精確定位;容易製成直線移動型馬達;噪音小:無電磁干擾亦不受電磁干擾;需使用耐磨材料(接觸型USM)和高頻電源等。但它也有自己的缺點,如:功率小;壽命短等。
超聲電機的兩個顯著特點是:1)低速大力矩輸出:2)保持力矩大,巨觀表現為起停控制性好。超聲電機能大力矩輸出是因為激振元件採用大功率密度的壓電陶瓷材料。同尺寸的超聲微電機的力矩比靜電微電機高3-4個量級:比電磁微電機高1.2個量級且輸出轉速也比其它類型的微電機低。超聲電機的保持力矩至少是最大輸出力矩的2倍多,具有大的保持力矩是因為電機的定、轉子間依靠摩擦力實現轉子的驅動。由於以上特點,與超聲電機相連線的系統無須齒輪減速機構和制動機構,簡化了套用系統的結構。超音波電機有著誘人的套用前景,成為研究的一大熱點。具體地說,有以下幾方面:信息機器、光學儀器、微機器人、醫療機器、探測系統、精密加工等。超聲電機的發展趨勢是:大力矩、小尺寸、高效率、長壽命。
超音波電機原理
 原理
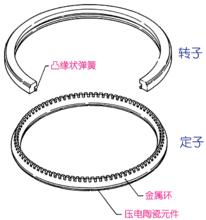
原理與傳統的電機不同,超音波電機無繞組和磁極,無需通過電磁作用產生運動力。一般由振動體(相當於傳統電機中的定子,由壓電陶瓷和金屬彈性材料製成)和移動體(相當於傳統電機中的轉子,由彈性體和摩擦材料及塑膠等製成)組成。在振動體的壓電陶瓷振子上加高頻交流電壓時,利用逆壓電效應或電致伸縮效應使定子在超聲頻段(頻率為20KHZ以上)產生微觀機械振動。並將這種振動通過共振放大和摩擦耦合變換成旋轉或直線型運動。
實現超音波驅動有兩個前提條件:首先,需在定子表面激勵出穩態的質點橢圓運動軌跡;其次,將定子表面質點水平方向的微觀運動轉換成轉子的巨觀運動或平動。第一個前提條件對應著機電能量轉換,利用逆壓電效應由電能轉化成機械振動能:第二個前提條件對應著運動形式轉化,往往通過定轉子間的摩擦力來實現,近年來亦有通過氣體或液體為中間介質接觸為非接觸型超音波電機,也稱為聲懸浮超音波電機。從超聲電機的工作原理可見,其正常工作離不開兩個能量轉換作用:機電轉換作用和摩擦轉換作用。機電轉換作用是指壓電陶瓷的逆壓電效應,即對壓電陶瓷振子加高頻振盪電流,使它以超音波的頻率振動。摩擦轉換作用是指彈性體(定子與壓電陶瓷的合稱)的振動經過定子與轉子工作面間的摩擦作用轉化成轉子的直線運動或旋轉運動。要保證大力矩輸出、止動性好,必須滿足的條件就是有效足夠的機電轉換作用和有效穩定的摩擦轉換作用。
套用領域
超音波電機的套用領域可概括如下:
 超音波電機
超音波電機1)航空航天領域
航空太空飛行器往往處在高真空、極端溫度、強輻射、無法有效潤滑等惡劣條件中,且對系統重量要求嚴苛,超聲馬達是其中驅動器的最佳選擇。
2)精密儀器儀表電磁馬達用齒輪箱減速來增大力矩,由於存在齒輪間隙和回程誤差,難以達到很高定位精度,而超聲馬達可直接實現驅動,且回響快、控制特性好,可用於精密儀器儀表。
3)機器人的關節驅動
用超聲電動機作為機器人的關節驅動器,可將關節的固定部分和運動部分分別與超聲馬達的定、轉子作為一體,使整個機構非常緊湊。日本開發出球型超聲電動機,為多自由度機器人的驅動解決了諸多的難題。
4)微型機械技術中的微驅動器
微型電機作為微型機械的核心,是微型機械發展水平的重要標誌。微電子機械系統(micro electronic mechanical systems,縮寫MEMS)的製造研發中,其電機多是毫米級的。醫療領域是微機械技術運用最具代表性的領域之一,超聲電機在手術機器人和外科手術器械上已得到套用。
5)電磁干擾很強或不允許產生電磁干擾的場合
在核磁共振環境下和磁懸浮列車運行的條件下,電磁電機不能正常工作,超聲馬達卻能勝任。
