背景
控制系統一般檢測物理量的變化或開關、按鈕的狀態,再根據一定的控制邏輯,輸出相應的控制信號,驅動執行機構。為了提高控制的精度,實際上這個過程是不斷循環進行的,即採用所謂的閉環反饋控制方式。例如,一個採用液壓缸的位置控制系統,需要不斷檢測液壓缸的位置或行程,根據PID控制邏輯,輸出控制信號控制電磁閥或伺服閥的開口度,調節液壓缸運動的速度。液壓缸運動速度與位置偏差有關,偏差越小,速度越低,最終將液壓缸位置控制在指定的精度範圍內。只要液壓缸的位置發生變化,輸出控制信號也會變化。
控制對象的物理參數類型較多,如位置、溫度、速度、壓力等,必須通過相應的感測器將這些物理量的變化轉換成電信號的變化,才能傳送給計算機系統進行檢測。控制精度的高低與感測器的檢測精度密切相關。
對於特定的計算機系統而言,電信號的輸入類型和範圍基本是固定的,為了規範化統一化,往往對感測器輸出的各類信號還需要進行調理處理,轉換成計算機系統能夠輸入的電信號。因而大多數感測器輸出的信號經過二次儀表(放大、調理、轉換),再傳送給計算機。
檢測的電信號由於收到外部干擾的影響,往往不能真實反映物理量的變化,為此,需要對檢測的信號進行必要的處理,去偽存真,從而提高控制精度。
控制信號
控制信號是計算機系統實施各類動態操作時生成的信號,多數控制信號由CPU生成,但其他功能部件也可能生成部分控制信號,以配合CPU完成較複雜的操作。在操作暫存器時,CPU產生的控制信號只在CPU內部作用於所操作的暫存器,不會出現在控制匯流排上;在操作外部存儲單元時,包括記憶體單元和連線埠,CPU產生的控制信號會出現在控制匯流排上。在這裡,我們將最基本、最重要、最常見的控制信號做一個介紹。
時鐘信號
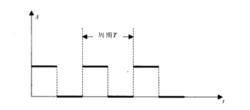
時鐘信號是一種周期性的方波信號,它是最基本的控制信號,也是產生時序過程的必要條件。圖中給出了時鐘信號的一般形式,橫坐標軸為時間軸,縱坐標軸為信號的幅度軸。時鐘信號的周期稱為時鐘周期,其頻率稱為時鐘頻率,一個時鐘周期通常被稱為一個節拍。
 計算機控制信號
計算機控制信號時鐘信號一般由晶體震盪片產生的周期信號經過整形、分頻後得到,一個計算機系統內,生成的時鐘信號只有一個,所有功能部件都會通過控制匯流排接收到這個信號,並以此信號為時間基準,進行有條不紊的工作。這就好像一個有周密規劃的公司一樣,在啟動一個項目後,對每位工作人員都安排了工作任務,但這些工作任務是有先後的,後面的任務需要等待前面的任務完成後才能進行,閃此,每位工作人員都要按照給定的時間限制來完成任務。那么,按照什麼時間來作為標準呢?在公司里,採用的就是當地時間,例如在中國,我們採用台北時間;類似地,在計算機系統模型中,時間基準就是時鐘信號,在啟動一個時序過程後,各功能部件按照約定好的節拍完成各自的操作,這就保證了計算機系統能夠有條不紊地工作。
讀/寫信號
讀信號和寫信號是兩種控制信號,但它們通常搭配在一起使用,因此將它們放在一起介紹。當CPU需要讀取對某一存儲單元中的數據時,它會產生讀信號,並施加在相應的功能部件上;當CPU需要向某一存儲單元保存數據時,它會產生寫信號,並施加在相應的功能部件上。對於8086/8088 CPU晶片,針對暫存器、記憶體單元、連線埠的讀寫信號是不同的控制信號,但讀/寫信號在不同的系統中定義也有區別。總的來說,讀信號針對存儲單元的讀操作,寫信號針對存儲單元的寫操作,這一特徵對任何計算機系統都適用。
片選信號
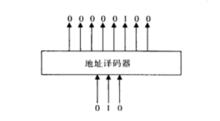
片選信號是一種特殊的控制信號,它足CPU針對外部存儲單元進行讀寫操作時產生的,但它是由地址匯流排的高位地址生成的,而非來自於控制匯流排的信號。物理地址中的高位地址用於區分不同的記憶體晶片或設備接口。這種區分在硬體上就是通過片選信號來實現的,片選信號是依靠地址解碼器生成的,其生成原理如圖所示。
 計算機控制信號
計算機控制信號在圖中,若地址解碼器的輸入為卯位輸入,則輸出為2 位,圖中以3位輸入為例。假設地址解碼器的輸人為3位高位地址,那么這3位高位地址可以理解為不同記憶體晶片或不同設備接口的編號,地址解碼器將高位地址解碼後,選通編號對應的輸出線路,而其餘輸出線路則處於未選通狀態。
例如,圖中,輸入編號“010”,則選通第2號輸出線路,使之輸出“1”,而其餘輸出線路均輸出“0”。這裡輸出線路編號是從第0號開始的,右側為低編號輸出。這些輸出線路上的信號便是片選信號,它們分別連線到不同記憶體晶片或不同設備接口的片選端,只有當相應片選信號有效後,記憶體晶片或設備接口才會接受CPU的讀寫操作。由於在任意時刻,只有一個記憶體晶片或設備接口被選中,因此,在任意時刻,只有一個記憶體晶片或設備接口能接受CPU的讀寫操作。中斷請求/中斷回響信號
中斷請求與中斷回響信號是一對控制信號,要完成完整的中斷過程,這兩個信號缺一不可。在現代計算機系統中,很多外部設備都屬於中斷型設備。最典型的中斷型設備為鍵盤、滑鼠等低速輸入設備。在沒有鍵盤、滑鼠輸入的情況下,CPU不會訪問它們的設備接口,而是執行系統程式或應用程式,僅當發生輸入事件時,設備接口才會通過控制匯流排向CPU傳送中斷請求信號。注意,多數控制信號都是由CPU通過控制匯流排發出,其他功能部件只是接收相應的控制信號,但中斷請求信號是例外的情況,它由中斷型設備發出,由CPU接收。實質上,中斷請求信號應屬於外部設備的狀態信號,而控制匯流排的全稱也應當是控制/狀態匯流排,包括CPU傳送給其他功能部件的控制信號和其他功能部件向CPU傳送的狀態信號。如果沒有在CPU內部設定中斷禁止,那么CPU在執行完當前指令後,會暫停當前程式的執行,並向控制匯流排發出中斷回響信號,提出中斷請求的設備接口接收到中斷回響信號後,會向數據匯流排傳送中斷類型號,CPU則從數據匯流排接收中斷類型號,並以此在記憶體中定位中斷服務程式,執行中斷服務程式調用,從而完成與設備接口的數據交換。除輸入設備外,輸出設備也叮能採用中斷方式與CPU互動,並且,除數據交換可以採用中斷方式外,設備出現故障需要CPU處理時也可以向CPU提出中斷請求。
時序過程
時序過程是指計算機系統中按照既定時間順序、分步驟完成的動態操作過程。指令的執行過程屬於時序過程,並且也是計算機系統中主要的時序過程‘,但並不是全部,例如中斷過程就不屬於指令執行的範疇。結合前面介紹的基本控制信號,在計算機系統模型中給出一種最基本的時序過程,應由此建立對時序過程理解的基礎,並在將來學習指令系統時.有意識地分析指令執行時可能的時序過程,以加深對指令執行的理解。
讀/寫操作是指令執行或其他時序過程中經常執行的,它本身也構成一個基本的時序過程。我們下面將分析CPU讀取記憶體單元的時序過程。注意,這裡給出的時序過程不針對任何一種具體的CPU晶片,只是一種概念性的說明。我們應當在此時序過程的分析中有意識地體會其順序性、步驟性。系統設計把讀操作分解為若干個步驟,每個步驟都能在一個節拍的時間內完成執行,下面分節拍列出各個步驟的操作。
(1)第一個節拍:CPU將記憶體單元的物理地址傳送到地址匯流排。
(2)第二個節拍:地址匯流排上信號穩定,等待片選信號的產生;CPU將讀控制信號傳送到控制匯流排。
(3)第三個節拍:控制匯流排上的讀信號已穩定,片選信號已產生並穩定;相應記憶體晶片被選通,低位地址信號進入記憶體晶片,記憶體晶片執行針對指定記憶體單元的讀操作。
(4)第四個節拍:記憶體晶片讀操作執行完畢,記憶體單元中的數據傳送到數據匯流排。
(5)第五個節拍:數據匯流排上的信號穩定,CPU將數據匯流排上的數據寫入到暫存器。
從上面的例子中,我們應當認識到,任何時序過程所消耗的時間都是節拍的整數倍。對於寫操作的時序過程,可以自己根據對讀操作時序過程的理解來構造。在介紹中斷請求/中斷回響信號時,已對中斷過程大致作了說明,讀者可以進一步將其分割為以節拍為單位的步驟,構造出中斷時序過程。
機器指令系統
機器指令的概念在前面的章節中已經多次提到,對其概念,這裡再重新歸納一次。機器指令實質上是一種二進制編碼,不同編碼對應不同的指令功能。機器指令除了指明操作類型外,還包含了對運算元的定址方式或運算元本身等信息。通常,一條完整的機器指令分為操作碼欄位、定址方式欄位、立即數欄位和位移量寧段幾個部分,各欄位占據的二進制位數因指令而異,如圖所示。在具體韻機器指令中,除操作碼欄位是每種指令都必須具有的欄位外,可能並不會包含上述所有的欄位。
操作碼欄位用於標識指令功能,例如,加法指令、減法指令、邏輯與指令等等。定址方式用於表示指令所使用的運算元使用何種定址方式,例如,暫存器定址、存儲器定址等等。立即數欄位用於提供運算元本身,位移量欄位用於提供存儲單元的地址分量。機器指令格式在不同的計算機系統中各不相同,同類指令執行的時序過程在不同系統中也各不相同。某一計算機系統的機器指令全集稱為該計算機系統的機器指令系統。機器指令的執行分為讀取指令、解釋指令、執行指令幾個步驟,這幾個步驟都是通過時序過程來完成的,執行指令僅是指令執行過程的其中一個組成部分。
彙編指令實質上是機器指令的助記版本,由於使用英文助記符,它比機器指令更加容易記憶。但是值得注意的是,大多數彙編指令的格式都是從機器指令格式演化而來的,而不是隨意定義的,而機器指令格式又是與CPU中指令解碼器的設計對應起來的。
常見的控制信號
時鐘
用來同步各種操作。
復位
初始化所有部件。
匯流排請求
表示部件需要獲得的使用權。
匯流排允許
表示需要獲得匯流排使用權的部件已獲得了使用權。
中斷請求
表示部件提出中斷請求。
中斷回響
表示中斷請求已被接收。
存儲器寫
將數據匯流排上的數據寫至存儲器的指定地址單元內。
存儲器讀
將指定存儲單元中的數據讀到數據匯流排上。
I/O讀
從指定的I/O連線埠將數據讀到數據匯流排上。
I/O寫
將數據匯流排上的數據輸出到指定的I/O連線埠內。
傳輸回響
表示數據已被接收,或已將數據送至數據匯流排上。
控制信號及其實現
機電控制系統的主要控制對象是電動機、液壓缸等執行機構,其控制形式多樣,控制系統需要針對具體的控制對象輸出相應控制信號。
控制信號的類型
根據機電系統控制對象的不同,控制信號可以分為四大類:模擬信號、數位訊號、開關信號和脈衝信號。
模擬信號
所謂模擬量信號,是指採用不同的電信號大小表示控制信號的大小,如電動機控制中,用一10V~+10V的電壓表示一1000~+1000r/min的轉速,電壓信號的每一個數值都代表不同的轉速輸出。模擬量信號的取值是連續的。
計算機系統內部採用數字方式存儲、傳輸數據,如果控制對象需要模擬量的控制信號,則必須經過模擬量到數字量的轉換,經D/A轉換後,才可以輸出給控制對象。
模擬量一般採用電壓信號,其電壓範圍如下:一10V~+10V;一5V~+5V;0V~+10V;0V~+5V。
電壓信號隨著控制線路的延長和工作環境的影響,容易衰減或受到干擾,這就限制了控制計算機與控制對象之間的距離,電壓形式的模擬信號只能在較短的距離進行控制。為了克服這個問題,往往還採用電流形式的模擬量控制信號,可以把控制距離延長到100~200m。
電流形式的模擬量範圍如下:0~20mA;4~20mA。其中,以4~20mA電流形式使用最為廣泛。
數位訊號
數位訊號實際上一種離散信號。在一根信號線上,以不同的電壓範圍表示0和l兩種狀態。多根信號線0、1的組合或同一信號線不同時刻0、1的組合形成控制機電對象所需要的數值。
表示0和1的狀態可以採用正邏輯,即低電平表示0,高電平表示1;也可以採用負邏輯,用高電平表示0,低電平表示1。
數位訊號的傳輸方式分成並行和串列兩種:並行傳輸是把不同線路同一時刻的二進制數組合在一起;而串列則是把同一線路不同時刻的二進制數組合在一起,如RS232、RS485、乙太網以及現場匯流排傳輸均是採用串列方式傳輸數字撾控制信號。
計算機系統不同,表示0、1狀態的電信號範圍不同。對於普通的PC、單片機、DSP等,大多採用TTI。電平標準,即o~0.4V的電壓表示0,2.4~5V的電壓表示1;PLC系統則普遍採用24V電壓等級表示數字量的0和1。
數位訊號並行輸出時,可以採用二進制格式,也可以採用BCD碼(包括8421碼和格雷碼),這是由軟體與連線線決定的。
數位訊號採用一定範圍的電壓表示0和1,可以克服模擬量信號易受干擾影響的缺點,能夠提高控制精度。在要求較高的情況下,應該儘量採用數字控制信號。目前,許多感測器的輸出也採用數位訊號。
開關信號
開關信號是針對某一根信號線而言的,其不同電壓範圍表示0、1(或開、關)兩種狀態。上述的並行數位訊號實際就是由多個開關信號組合而成。在許多控制模組或板卡中,並不明確區分開關信號和數位訊號。
如PLC系統的數字模組,單獨的每個數字連線埠可以作為開關信號的輸出,用於控制某個燈或狀態,如某些變頻器的速度設定就是採用2個或3個開關信號選擇內部定義的固定速度;而把它們每8個或16個組合在一起,則可以作為一個位元組或整數數值的輸出。
開關信號具有以下幾種不同的輸出形式:TTL電平輸出;繼電器輸出;集電極開路輸出(OC輸出)。
TTL電平輸出的輸出接點與公共端之間輸出直流電壓,根據輸出電流的大小,可以直接控制一定的負載,如指示燈、電磁閥等。為了保護輸出電路,往往採用光耦隔離措施,即使外部短路,也不會損壞內部電路。
繼電器輸出屬於無源輸出,每個輸出接點相當於一個開關,不能直接帶負載,需要在控制迴路中串接電源。針對負載特點,可以採用直流電源,也可以採用交流電源。因而是一種比較靈活的輸出形式。繼電器輸出的連線如圖所示。
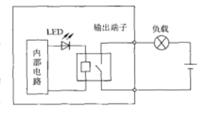 繼電器輸出的開關信號連線
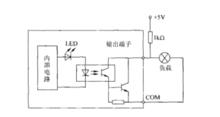
繼電器輸出的開關信號連線集電極開路輸出時,電晶體的集電極處於開路狀態。當內部電路導致電晶體導通時,輸出接點(端子)與公共端之間為管壓降(0.4V),表示0,當電晶體不導通時,輸出接點處呈現高阻態,其狀態不確定。為此,需要將集電極通過電阻連線到+5V電源,這樣,當電晶體不導通時,電源通過電阻、負載與地形成一個迴路,輸出接點(集電極)處電壓即為電阻與負載分壓的電壓,只要超過2.4V,就可以表示1。採用的電阻稱為上拉電阻,其阻值的大小決定了帶負載的能力。集電極開路輸出的連線如圖所示,集電極開路輸出開關量信號,當內部輸出高電平時,光耦導通,使得電晶體也導通,輸出接點處呈現低電平,為0;而當內部輸出低電平時,光耦隔斷,電晶體不導通,輸出接點呈現高電平,為1。套用集電極開路輸出開關量,給輸出暫存器傳送控制數據時,應採用負邏輯,希望輸出1時,實際傳送0。
 計算機控制信號
計算機控制信號脈衝信號
脈衝信號是以某個線路上脈衝數量的多少表示控制數據的大小,如第3章介紹的步進電動機控制,一個脈衝代表電動機旋轉一個步距角。
脈衝信號可以採用開關信號實現,按照指定的時間間隔輸出高電平和低電平形成需要的脈衝序列,也可以採用專門的定時器實現脈衝輸出。
控制信號的實現
採用計算機實現機電系統控制,要求具備模擬信號、數位訊號、脈衝信號等的輸入輸出處理能力。
普通微機可以通過串列口、印表機進行簡單的數位訊號輸入輸出,對於大多數機電控制系統來說,則需要通過板卡擴充其模擬量、數字量通道。根據匯流排不同,具有ISA、PCI和USB等類型的板卡。
提供輸入輸出板卡的供應廠家很多,主要有美國國家儀器(NI)、研華、菱華、研祥、康拓、中泰、嘉兆、阿爾泰等公司。
1)PCL818:16路12位模擬量輸入,32路TTL電平數字量輸入輸出。
2)PCL833:3路24位正交編碼計數。
3)PCL836:6路獨立計數器,32路TTL電平數字量輸入輸出。
4)PCL725:8路繼電器輸出,8路光隔數字量輸入。
5)PCL711B:8路12位模擬量輸入,1路12位模擬量輸出,32路TTL電平數字量輸入輸出。
6)PCL726:8路12位模擬量輸出。
7)PCL730:32路TTL電平數字輸入輸出。
8)PCIl713:32通道12位隔離模擬量輸入卡。
9)PCIl716:16路16位模擬量輸人,2路16位模擬量輸出,32路TTL電平數字量輸入輸出,1路16位計數器。
10)PCIl784:4軸正交編碼計數。
11)PCIl753:96/192位數字量I/O卡。
12)PCIl781:8通道計數器/定時器卡。
13)USB4711A:16路12位模擬量輸入,2路12位模擬量輸出,16路TTL電平數字量輸入輸出,1路32位計數器。
14)USB4716:16路16位模擬量輸入,2路16位模擬量輸出,16路TTL電平數字量輸入輸出,1路32位計數器。
15)USB4718:8路熱電耦輸入。
16)USB4751:48路TTL電平數字量輸入輸出。
17)USB4761:8路繼電器輸出,8路光隔離TTL電平數字量輸入
其中,PCLxxx為ISA匯流排板卡、PCIxxxx為PCI匯流排板卡,USBxxxx為USB匯流排板卡。PCL833和PCL836卡在電動機的運動控制中套用較多,一般採用PCL833檢測電動機編碼器的正交編碼脈衝,採用PCL836輸出脈衝控制電動機(伺服電動機或步進電動機)。
PCL836卡可以提供如下功能:6個指定頻率的脈衝輸出;3個PWM脈衝輸出;6個高速計數;16個數字輸入口;16個數字輸出口。其中頻率脈衝輸出和PWM脈衝輸出需要利用同樣的硬體資源,不能同時使用。
研華公司的所有板卡驅動採用設備管理器進行,其輸入輸出函式基本一致。
研祥公司的I/O控制板卡
研祥公司是中國深圳的工業自動化產品製造商,其生產的模擬量、數字量、脈衝量板卡大多數與研華公司的產品兼容。研祥公司的PCL711B、PCL725、PCL726、PCL833、PCL836卡等與研華公司的同型號產品兼容,但其提供的驅動程式不同,編程方法也不一樣。研祥公司的控制板卡主要以控制項形式提供Windows平台下的編程接口。研祥的PCI輸入輸出板卡主要有:
1)PCI一64AD:64通道12位模擬量輸入、16路TTL電平數字量輸入輸出。
2)PCI一144DIO:144路TTL數字量輸入輸出。
3)PCI一16P16R:16路繼電器輸出,16路隔離數字量輸入。
阿爾泰公司的I/O控制板卡
阿爾泰公司是中國北京的工業I/O產品製造商,其產品系列包括ISA、PCI、USB匯流排的模擬量、數字量、脈衝量的輸入輸出,價位較為低廉。阿爾泰公司的產品提供Windows平台下VB、VC、Delphi以及LabView的驅動,接口函式簡單方便。阿爾泰公司的工業控制板卡產品主要有:
1)BHSl05:8路12位模擬量輸入,2路模擬量輸出。
2)BH5118C:32路12位模擬量輸入。
3)BH5200:9路16位計數器,32路TTL電平數字量輸入輸出。
4)PCI2001:32路16位100K高速光隔離模擬量輸入。
5)PCI2003:16路12位模擬量輸入,2路12位模擬量輸出,32路TTL電平數字量輸入輸出。
6)PCI2007:4路16位模擬量輸出。
7)PCI2304:8路12位模擬量輸出。
8)PCI2307:16路繼電器輸出,16路隔離TTL電平數字量輸入。
9)PCI2310:32路OC數字量輸出,32路隔離TTL電平數字量輸入。
10)PCIl020:4軸運動控制卡。包括:4路脈衝輸出,4路32位正交編碼計數,32路光隔離數字量輸入,32路光隔離數字量輸出。
11)USB2310:32路12位模擬量輸入,32路TTL電平數字量輸入輸出。
12)USB2810:32路12位模擬量輸入,16路TTL電平數字量輸入輸出,3路16位定時計數器。
BHXXXX為ISA匯流排的板卡。
