
部件介紹
行走機構是行走式機器人的重要執行部件,它由行走驅動裝置、傳動機構、位置檢測元件、感測器、電纜及管路等組成。行走機構一方面支承機器人的機身、臂部和手部,因而必須具有足夠的剛度和穩定性;另一方面,還需根據作業任務的要求,實現機器人在更廣闊的空間內的運動。
行走機構按其運動軌跡可分為固定軌跡式和無固定軌跡式兩類。固定軌跡式行走機構主要用於工業機器人,如橫樑式機器人。無固定軌跡式行走機構根據其結構特點分為輪式行走機構、履帶式行走機構和關節式行走機構等。在行走過程中,前兩種行走機構與地面連續接觸,其形態為運行車式,套用較多,一般用於野外、較大型作業場合,也比較成熟;後一種與地面為間斷接觸,為動物的腿腳式,該類機構正在發展和完善中。
特點
行走機構根據其結構分為車輪式、履帶式、步行式和其他方式。以下分別論述各行走機構的特點。
車輪式行走機構
車輪式行走機構具有移動平穩、能耗小,以及容易控制移動速度和方向等優點,因此得到了普遍的套用,但這些優點只有在平坦的地面上才能發揮出來。目前套用的車輪式行走機構主要為三輪式或四輪式。
三輪式行走機構具有最基本的穩定性,其主要問題是如何實現移動方向的控制。典型車輪的配置方法是一個前輪、兩個後輪,前輪作為操縱舵,用來改變方向,後輪用來驅動;另一種是用後兩輪獨立驅動,另一個輪僅起支承作用,並靠兩輪的轉速差或轉向來改變移動方向,從而實現整體靈活的、小範圍的移動。不過,要做較長距離的直線移動時,兩驅動輪的直徑差會影響前進的方向。
四輪式行走機構也是一種套用廣泛的行走機構,其基本原理類似於三輪式行走機構。下圖所示為四輪式行走機構。其中圖a、圖b所示機構採用了兩個驅動輪和兩個自位輪(圖a中後面兩輪和圖b中左、右兩輪是驅動輪);圖c所示是和汽車行走方式相同的移動機構,為轉向採用了四連桿機構,迴轉中心大致在後輪車軸的延長線上;圖d所示機構可以獨立地進行左、右轉向,因而可以提高迴轉精度;圖e所示機構的全部輪子都可以進行轉向,能夠減小轉彎半徑。
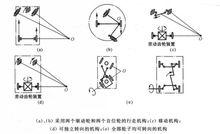 四輪式行走機構
四輪式行走機構 在四輪式行走機構中,自位輪可沿其迴轉軸迴轉,直至轉到要求的方向上為止,這期間驅動輪產生滑動,因而很難求出正確的移動量。另外,用轉向機構改變運動方向時,在靜止狀態下行走機構會產生很大的阻力。
履帶式行走機構
履帶式行走機構的特點很突出,採用該類行走機構的機器人可以在凸凹不平的地面上行走,也可以跨越障礙物、爬不太高的台階等。一般類似於坦克的履帶式機器人,由於沒有自位輪和轉向機構,要轉彎時只能靠左、右兩個履帶的速度差,所以不僅在橫向,而且在前進方向上也會產生滑動,轉彎阻力大,不能準確地確定迴轉半徑。
下圖a所示是主體前、後裝有轉向器的履帶式機器人,它沒有上述的缺點,可以上、下台階。它具有提起機構,該機構可以使轉向器繞著圖中的A-A軸鏇轉,這使得機器人上、下台階非常順利,能實現諸如用摺疊方式向高處伸臂、在斜面上保持主體水平等
各種各樣的姿勢。下圖b所示機器人的履帶形狀可為適應台階形狀而改變,也比一般履帶式機器人的動作更為自如。
 容易上、下階梯的步履式機器人
容易上、下階梯的步履式機器人 步行機構
類似於動物那樣,利用腳部關節機構、用步行方式實現移動的機構,稱為步行機構。採用步行機構的步行機器人,能夠在凸凹不平的地上行走、跨越溝壑,還可以上、下台階,因而具有廣泛的適應性。但控制上有相當的難度,完全實現上述要求的實際例子很少。步行機構有兩足、三足、四足、六足、八足等形式,其中兩足步行機構具有最好的適應性,也最接近人類,故又稱為類人雙足行走機構。
1.兩足步行機構
兩足步行機構是多自由度的控制系統,是現代控制理論很好的套用對象。這種機構結構簡單,但其靜、動行走性能及穩定性和高速運動性能都較難實現。
如下圖所示,兩足步行機構是一空間連桿機構。在行走過程中,行走機構始終滿足靜力學的靜平衡條件,也就是機器人的重心始終落在支持地面的一腳上。這種行走方式稱為靜止步態行走。
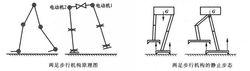 兩足步行機構
兩足步行機構 兩足步行機器人的動步行有效地利用了慣性力和重力。人的步行就是動步行,動步行的典型例子是踩高蹺。高蹺與地面只是單點接觸,兩根高蹺在地面不動時人想站穩是非常困難的,要想原地停留,必須不斷踏步,不能總是保持步行中的某種瞬間姿態。
2.四足步行機構
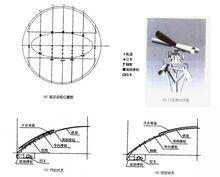
四足步行機構比兩足步行機構承載能力強、穩定性好,其結構也比六足、八足步行機器人簡單。四足步行機構在行走時機體首先要保證靜態穩定,因此,其在運動的任一時刻至少應有三條腿與地面接觸,以支撐機體,且機體的重心必須落在三足支撐點構成的三角形區域內,如圖所示。在這個前提下,四條腿才能按一定的順序抬起和落地,實現行走。在行走的時候,機體相對地面始終向前運動,重心始終在移動。四條腿輪流抬、跨,相對機體也向前運動,不斷改變足落地的位置,構成新的穩定三角形,從而保證靜態穩定。
然而為了適應凸凹不平的地面,以及在上、下台階時改變步行方向,每隻腳必須有兩個以上的自由度。
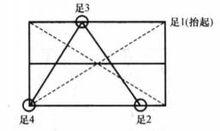 四足步行機構的靜態穩定
四足步行機構的靜態穩定 3.六足步行機構
六足步行機器人的控制比四足步行機器人的控制更容易,六足步行機構也更加穩定。下圖所示為有十八個自由度的六足步行機器人,該機器人能夠實現相當從容的步態。但要實現十八個自由度及包含力感測器、接觸感測器、傾斜感測器在內的穩定的步行控制也是相當困難的。
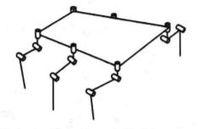 18個稀有度的六足步行機器人
18個稀有度的六足步行機器人 其他行走機構
為了達到特殊的目的,人們還研製了各種各樣的移動機器人機構。下左圖所示為爬壁機器人的行走機構示意圖。左圖a所示為吸盤式行走機構,其用吸盤互動地吸附在壁面上來移動。左圖b所示機構的滾子是磁鐵,當然壁面是磁性體才適用。右圖所示是車輪和腳並用的機器人,腳端裝有球形轉動體。除了普通行走之外,該機器人可以在管內把腳向上方伸,用管斷面上的三個點支撐來移動,也可以騎在管子上沿軸向或圓周方向移動。其他行走機構還有次擺線機構推進移動車,用輻條突出的三輪車登台階的輪椅機構,用壓電晶體、形狀記憶合金驅動的移動機構等。
 其他行走機構
其他行走機構 起重機械
行走機構包含整個起重機的行走和提升機構部件的行走。除要注意其負荷的GD和運動阻力外,還要考慮行走路線的坡度及室外行走時風雨的影響使摩擦轉矩增大的因素。行走機構的功率除由運動阻力決定的摩擦轉矩外,更要考慮加減速時所需的轉矩。該轉矩要比靜轉矩大,其目的是減少加減速時間,提高運行效率。
鏇轉鑽機
一般,大型鑽機多用履帶式行走機構,小型鑽機多用輪胎式行走機構,礦用鑽機採用履帶式的居多。為使鑽機行走時有較高的靈活性,每條履帶應採用單獨的驅動裝置。特別是小型鏇轉鑽機,在國外均採用油馬達單獨驅動,也有些鑽機採用電機單獨驅動的。輪胎式鑽機用於開採分散的小礦體更能發揮它的作用,履帶式鑽機多用在作業時間長、工作面比較固定的采場。還有些小型鏇轉鑽機,其平台可以全迴轉,以便節省移孔位的輔助作業時間。大多數鑽機的行走速度在1.2~2.8 km/h之間,爬坡能力為10°~15°,對地比壓小於1。對不同的露天礦,可選用不同寬度的履帶板。
開合屋蓋結構
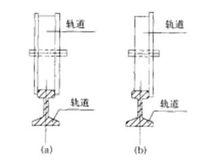
根據台車與軌道的接觸方式和輪軌數量,行走機構分為單軌單輪行走機構、單軌多輪行走機構、雙軌雙輪行走機構及多軌多輪行走機構4種。把一個台車與一條軌道的一個軌面有輪接觸的稱為單軌單輪行走機構;稱為單軌多輪行走機構;其他依此類推。
單軌單輪行走機構
單軌單輪行走機構(如圖)是吊車上常用的行走機構,其他形式的行走機構都源於此機理。由於軟鉤吊車在垂直軌道方向的水平力較小,所以吊車上常使用單軌單輪行走機構。由於開合屋蓋結構垂直軌道方向的水平力較大,以及垂直向上屋蓋浮力的存在,採用單軌單輪行走機構的移動屋蓋很少。但對小跨度無上浮合力的開合屋蓋可以考慮採用。
 普通軌道車輪連線方案
普通軌道車輪連線方案 單軌多輪行走機構
單輪多軌行走機構是住單一軌道的多個軌而上布置有不同功能的車輪。這些車輪的功能分別為行走車輪、導向車輪和抗浮車輪。在輪驅動方式下,行走車輪為驅動輪,其他功能的車輪均為從動輪。
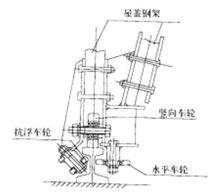 日本前野國小游泳館移動屋蓋的行走機構
日本前野國小游泳館移動屋蓋的行走機構 下圖行走機構只能沿著軌道方向移動,而垂直於軌道4個方向的位移都得到了約束。
下圖移動屋蓋的行走機構,它採用了輪驅動方式的單軌多輪行走機構。在移動屋蓋主桁架的切線方向布置行走車輪,軌道也傾斜布置在切線平面內,在該垂直方向布置上下兩個導向輪,利用軌道上翼緣和腹板形成的T形截面設定屋蓋抗風上浮卡槽。為了確保在規定的不同固定停靠位置的安全,在行走機構上設定了油壓驅動的鎖定銷栓。
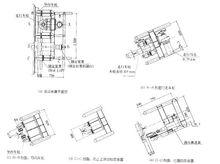 Mukogawa Gakuin 中學游泳館移動屋蓋行走機構
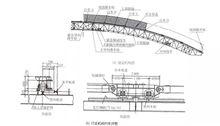
Mukogawa Gakuin 中學游泳館移動屋蓋行走機構 下圖是Ohita穹頂開合機構圖。這一機構採用了鋼纜繩驅動方式、異形單軌多輪行走機構方案。驅動機械安裝在地坪上,驅動方式非常簡潔。其異形軌道具有異形軌道的功能,對運動方向以外各方向均進行了約束。該行走機構有別於一般情況下台車固定在移動屋蓋上,隨屋蓋一起移動的特點,其台車是固定在移動屋蓋的支承結構上,屋蓋在台車上移動。為了防止鋼絞線與結構衝突,而特為鋼絞線布設了導向輪。
單軌多輪行走機構適用於行走軌道平面內荷載較大,而與其垂直的導向輪方向的橫向荷載較小的情況,行走機構緊湊,尺寸較小。一般來講,異形軌道比普通單軌單輪軌道更適合承擔較大的橫向力和抗浮荷載。
 Ohita穹機開合機構圖
Ohita穹機開合機構圖 雙軌雙輪行走機構
一般來講,雙軌雙輪為台車在兩個相互垂直方向上各布置一個輪軌裝置,主要受力方向的輪為行走車輪,另一個方向為導向車輪。在輪驅動方式下,行走車輪為驅動輪,其他功能的車輪均為從動輪。雙軌雙輪行走機構適合移動屋蓋根部或行走機構只承受單方向力和單方向水平合力的情況下,且移動屋蓋的尺寸為中小規模的開合屋蓋結構上。下圖是某小型開合屋蓋結構行走機構圖,作為一種較特殊的情況,兩個輪均布置在了同一個方向,用軌道邊緣導向,用L型金屬件抗浮。
下圖是小松穹頂的驅動與行走機構,移動屋蓋採用鋼纜繩牽引、普通雙軌雙輪行走機構,由於移動屋蓋採用了人字型鉸接結構,移動屋蓋對支承結構產生豎向壓力和水平推力,移動屋蓋還受有風的上浮力,為此,設計者採用了一個豎向輪軌和一個水平輪軌的雙軌雙輪布置方案,用以約束和傳遞豎向壓力和水平推力。由於受到空間尺寸和建築外形的限制,屋蓋的抗浮沒有採用普通的輪軌方案,而是採用了一種特殊的裝置。該裝置還有另一個的作用——防止在開合過程中發生地震時移動屋蓋脫軌。
 小松穹頂驅動與行走機構
小松穹頂驅動與行走機構 由實例看出:從受力看,台車或行走機構受有3個方向的作用力,其中兩個方向的荷載較大,另一方向是出現機率較小、持續時間極短的風荷上浮合力或防止地震脫軌的約束;從約束看,需要從3個方向對台車加以約束。實例採用雙輪雙軌行走機構,輪軌布置在兩個主要受力方向,受力較小方向的安全防範抗浮裝置採用非輪軸裝置。
多軌多輪行走機構
多軌多輪行走機構是在每個需要約束方向的平面內均布設一個或兩個普通輪軌行走裝置。這些車輪分別為行走輪、導向輪和抗浮輪。主要受力方向布置的車輪稱為行走輪,與行走輪在同一平面內相反方向的輪為抗浮輪;在垂直行走輪平面內的車輪為導向輪。有時導向輪也具有行走輪的部分功能。在輪驅動方式下,行走輪為驅動輪,其他車輪均為從動輪。
多軌多輪行走機構適用於大跨度、大規模的移動屋蓋體系。由於需要在垂直行走方向的4個方向的軌道槽內布設輪軌,加之機械檢修空間,所以軌道槽及其支承結構的剛度、強度、尺度都要很大。
除局部塊狀劃分的空間移動方式的開合屋蓋外,多軌多輪行走機構適用於各類剛性屋蓋劃分方法的開合結構。
