
 機器人的結構示意圖
機器人的結構示意圖數據採集
 超微型手術機器人
超微型手術機器人 蜜蜂機器人
蜜蜂機器人 可立於指甲蓋上的微型機器人
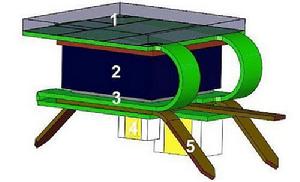
可立於指甲蓋上的微型機器人這些微型機器人僅用一塊電路板就實現了收集和傳回數據的功能,相當具有革命性。從前單晶片的機器人的開發在設計和製造是一種重大的挑戰,部分上是由於使用焊接方法來裝配。而這些新的微型機器人套用了表面貼裝技術,用可導電的粘合劑將配件粘合在可彎曲的雙面印刷電路板上。因此可以將電路摺疊到三分之一大小,並纏在特殊套用積體電路(application-specific integrated circuit,ASIC)表面。
另外,一塊能產生3.6V電壓的太陽能電池便可以提供足夠機器人行走所需的能量。機器人用三條振動的機械腿來移動,另有一條水平安置的機械腿則被用作一個觸感感應器。當一隻微型機器人不夠用時,多個這樣的機器人可以建立起群體智慧型並進行更複雜的行為,所獲取的數據將輸入計算機,以供建立更為理想和複雜的圖形。
智慧型機器人理念
這個項目是出於“微觀操作的自主智慧型機器人” (intelligent small-world autonomous robots for micro-manipulation,I-SWARM)的理念,並受到了昆蟲行為的啟發。
 微型機器人
微型機器人科學家正在研究如何用有限的經費實現這項新技術。然而最近太陽能電池控制程式的安裝並不順利,倘若要在未來高效地批量生產微型機器人,生產工藝的改進仍任重道遠。
