自動平衡技術的研究概況
在現代大型企業(如電力、冶金、石化等等)中,許多旋轉機械是生產流程中的關鍵設備,它們能否平穩運行在很大程度上影響著企業的經濟效益。轉子振動故障在這些旋轉設備上時有發生,引起轉子振動的因素很多,其中最主要的是旋轉機械內部的不平衡量。由不平衡引起的振動則占有多數,據L. J. Everett調查約占80%。
旋轉機械振動控制技術是一種典型的故障自愈技術,其研究內容主要集中於不平衡振動控制方面。振動主動控制技術的核心部分在於平衡裝置、控制方法和振動信號採集與處理的研究,下面對該類技術的發展狀況進行論述。
轉子動平衡的方法
影響係數法
早在1870年,Martinson就已經開發出一種平衡機。在這種平衡機上,“重點”是由手工標出的。在較低的速度(低臨界轉速下),由Jeffcott轉子的運動分析可知“重點”與“高點”是一致的。
T. C. Rathbone是一個在西屋公司南費城分公司從事大型發電機組工作的實驗工程師,在其1929年的文章《汽輪機振動與動平衡》一文中,介紹了利用閃光觀測器研究一個重達50噸的轉子的振動問題。
在1934年,通用電氣公司的E.L. Thearle提出了一種基於線性轉子系統的雙平面半圖形的平衡過程。與Rathbone的實驗疊代求解相比,Thearle這種方法得到的是一種解析解。
在1939年,J. G Baker和T. C. Rathbone在各自的文章中概述了Thearle的研究工作。J. G Bake:在其文章中介紹了利用一次僅影響一個軸承的成組試重集合研究振動的方法,該方法套用到了兩個軸承和三個軸承的系統,該文獻被認為是影響係數法建立中的關鍵文獻。
在1932年,K.R. Hopkirk在其中給出我們現在所說的影響係數法的定義原則。在1940年,K.R. Hopkirk在其文獻《Notes on methods of balancing》中提出了一中利用影響係數的雙平面動平衡方法,該方法同我們現在的影響係數方法一樣。
在1964年,T.P. Goodman介紹了利用最小二乘法的動平衡方法,該方法極大的改進了動平衡技術。
基於不同的組合方式,A.G Parkinson, M.S. Darlow, A.J. Smalley, and R.H. Badgley在其研究了他們所謂的統一平衡方法。
在1972年,J. W Lund和J. Tonnesen在其中對每個平衡面利用兩次試重來識別和減少儀器誤差。
國內學者對影響係數法也進行了大量的研究工作,空軍工程大學鄧理博等人針對平衡過程中影響係數法存在的殘餘振動量偏大、配重質量受限等問題,提出了3種改進方法:即加權疊代最小二乘法、限制配重的最小二乘法和基於遺傳算法的最小二乘法,並進行了實驗驗證。南京航空航天大學的章憬漩等人也對最小影響二乘係數法進行改進,研究了基於遺傳算法的最小二乘法,使平衡配重量和殘餘振動值均達到了最佳化。重慶大學的凌建等人通過求轉子軸承系統的頻響函式獲得轉子的影響係數,並進行了相應的實驗研究。西安熱工研究院的寇勝利對柔性轉子採用影響係數法產生的病態方程進行了研究,並提出了防止平衡過程中出現病態方程的方法。
模態法
K.P. Hopkirk在1932年中首次將受靜不平衡力P和力偶T引起的振動歸為兩種模式,並給出了受諸如KP + KT線性組合的激勵決定的臨界轉速公式。給出了在一端存在不平衡時,兩階轉子振動的模態變化情況。
在1953年,L. P. Grobel在其中給出了一種從低階平衡轉子的模態方法。在1969年,J.R. Lindsey在其中詳細給出了利用靈敏度和高點數組和的靜力-力偶平衡試重方法。在六十年代,Lindsey給出的方法平衡了一百多個轉子。
在1959年,R.E.D. Bishop在其中提出了具有分布質量和彈性的圓形轉子的振動位移的幅值方程,同年,R.E.D. Bishop和G M. L. Gladwell介紹了模態動平衡的內涵。
1963年,A. G Parkinson、K.L. Jackson及R.E.D. Bishop進一步討論了模態動平衡的理論及在幾個細軸上的相關實驗。A.L.G Lindley和R.E.D. Bishop中討論在軸承剛度遠大於軸剛度的120-SOOMW大型汽輪機上模態動平衡法的套用。
國內方面,林寶根在1991年對汽輪機振型平衡方法進行了研究,並分析了平衡修正面的選擇問題;浙江大學賀世正等人在2000年對具有彈性支承懸臂高速轉子進行振型分離平衡做了理論探討,並給出了滿足平衡一、二階振型在轉鼓上的加重比例;西安交通大學徐賓剛、屈梁生等人將全息譜技術引入振型平衡法上,實現柔性轉子前兩階陣型的平衡,並給出了減小平衡誤差的相應對策。
僅用振幅的動平衡法
在振動測量的早期,很難精確得到一倍頻的相角。僅用振幅的動平衡技術在那時出現,並且該技術一直套用到今天。
在西屋電氣製造公司的研究部,GB.Karelitz使用三次試重來平衡發電機。這種圖形技術使用不平衡探測器來查找質量不平衡;不平衡探測器包括四個透明帶,這些透明帶在一端的支點上連線在一起。該方法可使用於不同大小的試重。
F. Ribary提出了一種圖形化的構思,即僅使用從系統的初始狀態和三次試重運行獲得振動幅度就能平衡系統。LJ. Somervaille大大簡化了Ribary的圖形法。Somervaille的作圖法也被稱為無相位的四圓平衡法。現在普遍使用的四圈法可以在C. Jackson中找到。
只用振幅的平衡方法有以下的進一步發展。K.R. Hopkirk提出只用振幅執行兩個平面的精確點(或稱準點)平衡的分析解決方案;這種技術需要運行七次。通過使用兩種模式的模態平衡試重,L.E. Barrett, D.F. Li和E. J. Gunter X改進了K.R.Hopkirk的方法;通過三種模式的配重,E.J. Gunter, H. Springer和R.R. Humphris發展了使用無相位信息的模態平衡法平衡轉子。在沒有參考早期的相關發展情況下,L.J. Everett獨立地研究出了僅使用振幅的雙平面平衡法。
由於僅使用振幅的平衡方法需要多次的開停車運行,與影響係數法相比這種方法效率較低。此外,完成這樣一個平衡以後,沒有信息將有助於微調平衡或者在未來執行的平衡。進一步的修正平衡還需要四次起停車。
僅使用相位的平衡
正如N.F.Rieger或者F.Ribary所描述的19世紀的一些早期平衡機可通過直接軸做標記來獲取相位數據。C. Jackson介紹了一種獲取相位的方法,就是使用鉛筆標記軸以及使用軌跡(Lissajous圖)分析;然後Jackson將轉子物理納入了平衡中,無論其高於、低於還是接近臨界速度。這種技術可能需要多次疊代以便找到一個解決方案,這需要依賴平衡從業人員的知識和經驗。
K.R.Hopkirk姍究了一種雙平面平衡技術,該技術僅使用相位信息。Hopkirk的方法包括兩個平面的準確平衡點,這種方法實施時需要五次起停車運行(包含系統的初始狀態)。LJ. Somervaille}39]提出一種僅使用相位信息的圖形化手段來解決一個光碟 (單平面)的不平衡。
W C. Foiles和D.E. Bently研究了僅使用相位信息解決單平面和多平面平衡的解析解和圖形解方案;他們的解決方案通過使用部分信息,是一種改進的影響係數法。沒有相位的單平面平衡需要三次試重,這種技術只使用兩次試重。僅用相位信息的單平面和多平面平衡方法都已被開發。Foiles和B ently的文章允許使用大小不同的試重,提出解析法和圖形法解決單平面平衡(多平面影響係數)的方法,同時作者將這種技術套用於冷卻塔風機上。Somervaille的單平面平衡圖形技術是更好地圖形方法。
線性規劃技術
1971年,美國維吉尼亞大學的R.M. Little在其博士論文中第一次把動平衡當做一個受約束的最佳化問題來研究。1976年,R.M. Little和W D. Pilkey介紹了一種利用線性規劃的動平衡方法,該方法對平衡配重的大小有限制條件;然而,這種技術需要至少和測量觀測量相同多的平衡配重,而這一般是不可能的。當Little使用8個平衡面時,他的第一個平衡計算(分析模式)導致無解;他界定了平衡重量的大小來求出解來。
1979年,W D. Pilkey和J. T. Bailey通過一種與眾不同的問題表述,糾正了以前線性規劃方法的不足。Pilkey和Bailey將他們的方法分成與時間無關和隨時間變化的算法。這些技術包含以下內容:
1、線性和。將所有計算的殘留測量值(殘差絕對值)的總和最小化。
2、極小一極大。將最大殘留測量值最小化。
3、最小二乘。將所有的殘留測量值的平方和最小化,其中包括正確的平衡重量大小的限制。這將產生二次規劃。
對於施加在於x和Y軸的平衡配重,時間獨立的方法只能查看軸在位於位置軸回響,因為線性規劃法使用的是實數類型的影響係數。隨時間變化的技術與上述軸的其他方向的約束或者在軸的初始位置等效的平衡重量相關的限制內容相似。
1981年,E. Woome:和W Pilkey擴展了平衡問題的二次方公式化表述。他們使用一種平衡重量上不等式條件的轉變。這種轉變保證了新的可變因素的積極性,致使二次規劃技術可以直接使用。
1989年,M.S. Darlow討論了當使用超過需要的平衡面時的冗餘平衡面的問題。通常由於影響矩陣是病態條件而致使計算巨大的平衡重量。這種情況是因為影響係數矩陣的列線性相關。
2008年,Guoxin Li, Zongli Lin和Paul E. Allaire利用了凸最佳化的方法研究了高速機械的魯棒最優動平衡,並在1150MW的核汽輪發電機組系統上進行了套用。
無試重方法
不管是影響係數法、振型平衡法及兩者的綜合平衡法,在轉子的平衡過程中,一般需要進行多次的試重過程。為了避免多次試重引起的人力、物力浪費,一些學者研究了無試重的平衡方法。Gasch等人於1978年最先提出了基於轉子無試重平衡方法法的思想,P. Gnielka在此基礎上進行了進一步研究。Fritzen C. P.等人在1999年研究了一種柔性轉子無試重振型平衡方法,提出了計算柔性轉子真實陣型特性的方法,確定轉子各階不平衡量的分布情況,最終在實驗台上進行了相應的實驗驗證。國內方面,汪海良等人在1992年對柔性轉子的無試重平衡方法進行研究,採用了傳遞矩陣法對柔性轉子的各階模態進行分離,建立配重的分配方程,並進行了實驗驗證;徐賓剛和屈梁生等人在2000年採用了影響係數法的平衡目標和最佳化思想,利用遺傳算法進行配重的最佳化搜尋,實現了無試重的柔性轉子動平衡;繆紅燕和高金吉等人[SG]在2004年採用基於有限元數值分析方法的柔性轉子動平衡技術,在實驗轉子上實現了一次加重平衡成功。在工業套用方面,郭峰、董書岐、王延博等人採用了機械滯后角原理,實現了風機和汽輪機的無試重現場動平衡。
平衡頭分類
根據平衡頭產生不平衡量方式的不同,可以把目前已研製的平衡頭分為質量變分散式、質量變化式和作用力式等,現分類列出如下,如圖所示:
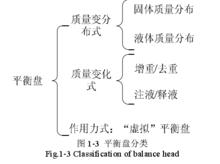 自動平衡控制
自動平衡控制質量變分散式平衡頭
不改變平衡面處質量的數量,而是改變質量分布來調整平衡頭產生的不平衡量的方法稱之為質量變分散式平衡頭。該型平衡頭可分為固體質量分布和液體質量分布兩不中。
華中理工大學張鴻海等人研製的智慧型式砂輪線上平衡儀、哈爾濱工業大學和浙江大學的電磁式平衡頭及美國LORD公司的自動平衡頭都屬於固體質量分布類型,其優勢在於根據電動機原理,採用電磁力這種非接觸方式去拖動平衡頭內質量不對稱的圓環,平衡盤都是屬於這一類型。
電磁式的自動平衡頭往往不能精確地使不平衡質量沿周向連續地微調,只能以“步”為單位移動或鎖定,由於受其位置調節分度的制約,在最大平衡能力和最小可調量之間通常有矛盾。
典型的使用兩個配重塊周向調節的方案里,在調節時,單向移動的配重塊在質量塊周向移動的過程中往往會有短時的轉子不平衡量增大的情況。可雙向移動的配重塊的設計只能部分解決這個問題。但同時這個設計造成平衡頭結構複雜化。
此外,在很強的離心力和振動下長時間運行時,自動平衡裝置的可靠性如何是影響實際工業套用的最主要因素之一,機械活動部件的磨損和疲勞也是一個需要考慮的問題。
平衡盤屬於液體質量分布類型,該類平衡頭存在調節速度或精度受到一定限制;此外,液體或蒸汽可能會泄漏;並且較難測得平衡頭內各個室里的液體量,等等問題。但是造價低廉,結構簡單,容易推廣。
質量變化式
這類平衡頭主要分為增重/減重和注液/釋液兩類。
通過在轉子某個位置線上增重或減重來實現不停機自動平衡。例如,Gusarov等人通過在轉子某個位置較輕的相位噴塗快速凝固的流態物質來平衡轉子。moue在一種用於自動動平衡機的專利里,用電火花加工方式在轉子某個區域用電火花刻蝕去重。此外,也有用雷射線上去重的。
注液式平衡頭通常有3個以上的儲液室,其調節配重方式是不停機線上地向儲液室里注入液體;平衡盤都屬於這一類。由於轉盤上沒有活動機械部件,相比較而言,注液式平衡頭加工製造簡單、動作可靠。
作用力式一“虛擬”平衡頭
產生虛擬力的手段通常是採用電磁的方式,例如1992年Chen等人的專利就利用主動電磁軸承的電磁力來實現對轉子偏心造成的振動的控制。2001年北京工業大學黃曉蔚等人對利用主動電磁軸承實現自動平衡的方法進行了實驗研究。
作用力式的平衡頭具有非接觸、無活動機械部件的優點,然而電磁軸承的承載力是有限的;同時由於電磁力支承具有副剛度,它實現穩定懸浮就已經比較困難,具有一定的不穩定性,需要閉環控制才可以克服。電磁力是一個隨磁間隙增大而非線性地迅速減小的力,這種非線性也使電磁力的大小比較難以精確控制。
注液式轉子振動平衡系統的典型結構
這種平衡系統的設計以德國Hofmann公司和德國Dittel公司的產品套用最為廣泛,下面分別予以介紹。
Hofmann公司的產品,以砂輪噴液型主動平衡裝置最為常用。該裝置採用計算機微處理系統實現閉環控制,其平衡砂輪最高轉速為60000 r /min,平衡所需時間為10秒到300秒,若需要重新平衡其時間大約為5秒,其平衡精度能達到。該平衡系統已在高速和超高速磨床上得到了廣泛套用,框圖如圖所示。
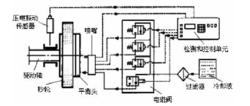 德國Hofmann公司的液壓平衡系統結構圖
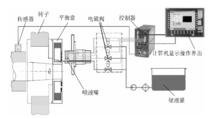
德國Hofmann公司的液壓平衡系統結構圖Dittel公司的H6000平衡系統主要由被控轉子、信號採集器、控制器和執行器四部分組成,主要套用在高精度的磨床機械,結構如圖5所示。
 自動平衡控制
自動平衡控制從這兩套系統來看,注液式振動平衡系統一般包括:振動檢測單元、振動信號處理單元、控制單元、液體流量控制單元和平衡盤等。系統開始工作後,振動感測器會實時檢測轉子的振動信號,系統中的控制單元會根據算法實時判斷當前轉子的振動是否超限,並計算超限情況下需注入平衡盤內的液體量,並根據振動反饋情況實時調整注液量,將振動控制在安全範圍內。在實際套用中發現這一類系統存幾個問題需要研究解決:
(1)平衡盤的結構設計制約,使系統在長期工作後,由於腔內液體注滿而失去平衡能力;
(2)採用電磁閥進行液體流量控制,當單個電磁閥發生故障時,系統將無法正常工作;而且電磁閥在設備運行過程中,開關頻繁,易發生故障;
(3)平衡算法原因造成首次噴液振動增大,對設備安全有一定程度危害。
為解決第一個問題,克服前述注液式平衡頭的缺點,賀世正提出了一種釋液式平衡系統。在該系統增加了一個電磁閥,通過電磁閥,儲液室滿了以後可釋放其中液體。但這種方式增加了平衡頭的製造難度,降低了可靠性。由於無法測量儲液室的液體量,只能通過是否有調節能力來判斷儲液室狀態,因此會造成某段時間調節效果較差。
2006年北京化工大學高金吉、張鵬設計了一種新型的可連續注液、排液的自動平衡頭,該平衡頭利用液位自衡原理,設計了不受控制的排液孔,只控制注液流速,通過連續不斷的注液在平衡頭內形成的動態液體實現轉子的不平衡補償。而且該平衡盤設計安裝簡單方便,而且由於不受控的連續排液,因此腔體不會因注滿而失去平衡能力,從而為解決第一個問題提供了新的辦法。
振動信號採集與處理技術
目前旋轉機械振動控制的研究主要還是集中在不平衡振動方面,因而關於旋轉機械振動信號數字處理方法的研究與套用的報導也主要集中在轉頻振動信號處理方面,所採用的核心算法主要是DFT(Discrete Foutier Tansform,簡寫成DFT)和FFT(FastFoutier Tansform,簡寫成FFT),該部分的成果對於轉子振動主動控制系統的實現具有很重要的借鑑意義,相關的套用報導主要有:
•報導基於FFT的軟體算法在動平衡試驗機上的套用。
•鄭建彬採用基於DFT的動平衡機不平衡量提取算法,在頻域提取不平衡量的幅度和相位,不平衡幅度測試精度達4m,相角小於2°。
•提出了基於FFT的數位訊號處理方法,根據測定的車輪動平衡轉速求解出與車輪不平衡量有關的振動信號的振幅和相位,把時域離散振動信號轉化到頻域進行分析處理。
•白志剛,唐貴基為了提取出轉子動不平衡信號的幅值和相位特徵,首先採用鎖相倍頻電路控制A心進行整周期採樣,然後利用FFT進行頻譜分析。
•首先列舉了互相關和傅立葉變換兩種算法的套用及特點,而後通過試驗從精度和計算時間兩方面進行了比較。認為採用傅立葉變換求解不平衡量的幅值和相位可以獲得良好的效果
•通過對相位差校正法的仿真計算及誤差分析,基於頻譜校正理論開發了虛擬動平衡測試儀,該測試儀可準確計算出不平衡質量的幅值及相位。
•董永貴提出一種整周期採樣的軟體實現方法來解決信號採樣問題。對鍵相信號與振動信號進行同步採樣,而對振動信號的整周期截取則利用軟體實現。其優點在於可利用通用數據採集卡實現整周期採樣。
•徐晶,於向軍引入現代數位訊號處理技術,基於快速傅立葉變換算法對球磨機軸承振動信號進行頻譜分析,實現了存煤量的監測,並對採集的試驗數據進行了處理與分析。
•耿慧論述了在旋轉機械的動平衡檢測中,採用轉速脈衝信號觸發A/ D進行整周期採樣,然後通過對採集到的整周期信號進行離散傅立葉變換,從而得到不平衡信號的幅值與相位。
