
簡介
定義
空間站是一個運行在太空軌道上的適合於人類活動、並且可以發揮人的能動性進行高效率工作( 如科學試驗、探測和生產等) 的場所 。為了確保空間站順利完成空間任務,需要對空間站的姿態和軌道進行控制,空間站控制是迄今載人飛船和各種套用衛星控制技術中最複雜的一種。控制系統是確保空間站成功發射和長期正常運行的核心組成部分。
空間站控制系統的主要任務包括三部分內容:
a.軌道控制 ——包括軌道測量、預報和機動。
b.姿態控制— 包括三軸姿態控制, 以及有效載荷的特殊指向控制。
c.交會對接與分離操作— 要 求對由其它來訪飛行器的交會對接與分離組成的空間運輸任務進行控制和管理。需要綜合考慮兩個太空飛行器的相對位置和姿態問題。
特點
1.空間站是多體組合,這些組合體的個數又是不固定的。例如空間站在組裝初期和末期,其結構就不大一樣,某些飛行器與空間站對接執行任務之後,又要與空間站解體。這樣,空間站質心位置就可能發生很大變化。變結構、質心大距離偏移是空間站需要重點解決的控制問題。
2.撓性結構。為了減輕空間運輸系統的負擔和適應空間結構的需要,空間站的很大部分是撓性結構。撓性結構的姿態控制和穩定是當前空間站控制中另一個關鍵問題。
3.空間站經常需要與另外的飛行器交會對接,這是、涉及到具有多個自由度的兩個飛行器的姿態和軌道相互關聯的控制問題。
4.空間站是一個高度複雜的人一機系統。空間站控制儘可能實現自動化和使用空間機器人。太空人對控制空間站僅起監視和督促作用,或者幫助處理和排除故障,完成自動控制和機器人所無法完成的任務。
研究背景及發展歷史
從上世紀七十年代前蘇聯發射第一個空間試驗室開始,世界各國已陸續發射上天十幾個空間站/空間實驗室,空間站是由計算機技術、控制、機械、電子、材料、能源、通信和航天醫學等多學科成果協同工作的大型複雜系統,其具有在軌工作時間長、航天員長期駐留、系統構型複雜及具備開展各種類型的空間科學實驗能力等特點。我國開展載人航天工程十餘年來,相繼取得了神舟一號至神舟七號飛行任務的圓滿成功,按照國家發展載人航天“三步走"的戰略思想,載人太空飛行器在突破空間交會對接技術後,將研製具備航天員長期駐留及進行空間科學實驗能力的空間站。
參考國際空間站設計理念及構型特點,空間站是由多太空飛行器、多系統組成,各太空飛行器分階段發射入軌,且均具備獨立控制和自主飛行的能力。入軌後組裝成空間站的多種形態組合體,各太空飛行器的功能體系融合到整個空間站的功能體系之中。因此為實現我國未來空間站多構型、長壽命、高可靠性的目標,必然要求多個控制系統具備協同工作的能力,並通過多個控制系統信息體系融合與互動,從而實現設備之間資源共享、故障診斷、信息重組等功能。針對未來空間站多個太空飛行器在軌組裝的特點,建立可動態配置及重構的高效控制系統信息體系,是實現多個太空飛行器控制系統之間信息互動必須解決的首要問題。
未來空間站要求控制系統具備實時進行各艙段的姿態和軌道控制任務,並實現多艙段在軌組裝後,多控制系統之間具備敏感器資源共享與融合、控制計算機診斷與重構、執行機構共用與重組等功能。這就要求多控制系統之間支持動態配置的同時,控制計算機、敏感器和執行機構之間,信息傳輸應具有較好的實時性和同步性。
空間站的姿態控制
空間站姿態控制分為姿態穩定和姿態機動兩部分。姿態穩定又分為兩種情況:第一種情況是空間站對地球指向穩定,主要為提供與地面通信和傳遞數據。這種對地指向精度要求為中等水平,一般在1度左右就能滿足要求;第二種情況是空間站有效載荷的穩定或者有效載荷在空間站進行有關實驗時的穩定,這種姿態穩定精度要求很高。一般以指向精度和姿態跳動量來劃分等級。為了滿足空間遙感的要求,有時還要求非常高的姿態穩定度,即單位時間姿態指向精度的變化值。
表列出空間站系統姿態指向精度要求和實現方法。
| 等級 | 精度(度) | 跳動量(度) | 方 法 | 用途 |
| Ⅰ | 1 | 0.5 | 1.控制力矩陀螺 2.噴氣推力器 | 核心站或空間站基地 |
| Ⅱ | 10 | 5×10 | 兩軸框架控制力矩陀螺 | 一般有效載荷 |
| Ⅲ | 5×10 | 10 | 高精度兩軸框架控制力矩陀螺 | 有效載荷 |
| Ⅳ | ≤10 | ≤5×10 | 自由飛行器或各種空間平台 | 特殊要求的有效載荷 |
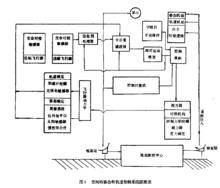 空間站姿態和軌道控制系統原理圖
空間站姿態和軌道控制系統原理圖如圖是空間站姿態和軌道控制系統原理方塊圖。控制方式有三種:自動、太空人手動和地面站遙控。執行機構有各種大小推力的推進器和控制力矩陀螺,以及相應卸載的磁力矩和重力梯度力矩。執行機構產生所需要的控制力和控制力矩。測量系統包括導航和姿態確定。交會對接有專門遠程和近程敏感器。整個系統由控制計算機進行信息卡爾曼濾波處理和實現各種控制規律。
空間站交會對接
空間站是由太空梭或其它運載工具多次發射、然後在空間組裝的。所以,這些部件要在空間進行交會對接。組裝後的空間站還需經常補充供給,以及保持空間站與各種空間平台之間的聯繫,也需要交會對接。所謂交會是指兩個或兩個以上的飛行器在軌道上按預定位置和時間相會。所謂對接是指兩個飛行器在軌道上相會後在結構上連成一個整體。
從控制觀點來說,交會和對接屬於空間飛行器軌道和姿態控制範疇,特別是對接,涉及到兩個飛行器同時要進行最多具有12個自由度的軌道和姿態自動控制間題,這不僅在技術上,而且在理論上都是相當複雜的。從空間交會和對接各階段的順序和相對運動可以看出:會合階段主要是軌道控制,也就是制導間題。接近階段大部分的屬於近距制導控制,只是在短距離的制導中還要有比較粗的控制,例如要求把兩個飛行器對接面的姿態控制在一定方位內,也就是姿態捕獲問題。停靠和對接階段同時要進行小距離高精度的軌道機動和精確姿態控制,這是交會對接中最關鍵的階段。
 空間交會對接控制程式
空間交會對接控制程式如圖表示空間交會和對接控制過程。橫坐標表示兩個飛行器相對距離,縱坐標表示實現交會對接的控制方法。
交會對接控制有三種方法:
1.地面站通過遙測和遙控對接。這種方式存在兩大困難。地面站對軌道上的飛行器能夠實現遙測和遙控的時間和軌道弧段是很有限的(除非在空間設有全球數據中繼衛星)。另一個困難是,下行遙測、上行遙控和地面計算機處理數據所需要的時間會造成控制迴路嚴重延遲,甚至導致對接失敗,
2.太空人手控操作對接。人在軌道上親自觀察、判別和決策,最後動手操作,這是目前比較成熟的方法,特別是為美國較多採用。但這種方法在載人航天高昂經濟代價和保證太空人安全方面存在一定的技術難度;
3.自主交會對接。一般不載人的空間平台和極軌飛行器需要自主交會對接。這種方法對不載人飛船最為合適。另外自主交會對接由於採用了敏感器和控制器(計算機),一般都比太空人反應迅速準確。但是自主交會對接系統比較複雜,而且技術上難度較大。隨著計算機和空間機器人的迅速發展,自主交會對接將是今後發展的方向。
根據上述交會對接的測量範圍和精度,很難用一種敏感器完成整個交會對接的測量任務。遠距離敏感器一般採用交會雷達。近距離可用電視攝像和光學成像敏感器。對接階段的執行機構採用冷氣系統,例如氮氣,因為氮氣推力小,控制精度高,而且對飛行器不會產生污染。目標飛行器姿態由它自己的姿態控制系統來保證,例如目標飛行器對接面保持與飛行方向垂直。這樣交會對接系統只需改變追蹤飛行器的軌道位置和姿態,就能實現追蹤和對接。
空間站控制系統
控制系統功能
在太空中飛行的空間站其運動可以分解為兩部分:一部分是作為一個等效質點在空間內外力矩的作用下所產生的質心平動運動,即軌道運動,另一部分是所產生的繞其質心的轉動運動,即姿態運動。由於未來空間站應滿足特定任務的需求,因此必須保證空間站的軌道及姿態的穩定。因此典型的控制系統信息傳遞關係為敏感器計算機、控制計算機、執行機構計算機一起構成的閉環控制迴路,控制計算機獲取多種敏感器的測量信息並通過執行機構產生控制力和控制力矩。
系統組成構想
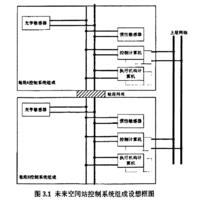 未來空間站控制系統組成構想框圖
未來空間站控制系統組成構想框圖構想未來空間站包括艙段A、艙段B兩個模組,均配置控制系統,單艙段均具有自主飛行和控制功能。入軌後組裝成空間站的多種形態組合體,空間站以艙段B為中心,兩個模組的功能體系融合到整個空間站的功能體系之中。艙段A控制系統作為艙段B的備份對空間站實施姿態軌控,其系統組成主要為控制計算機、慣性敏感器計算機、光學敏感器計算機及執行機構計算機。艙段B控制系統作為主份對空間站實施姿態軌控,其系統組成與艙段A相同,系統組成圖參見圖。
