
簡介
常見的角度測量產品傾角感測器、磁羅盤等,這些角度測量產品是以地球參考坐標係為基礎的且屬於靜態測量,用於定點測量沒有問題,但一些用戶往往要測量任意軸上的轉動角度,用基礎的角度測量產品很難實現,且由於傾角感測器、磁羅盤的測量原理當載體以較快速度變化時,測角的實時性很差.一種在短時間內測量任意軸上轉動的角角的感測器,主要用於穩定平台快速調整、平行導軌間角度的測量等.原理
利用陀螺儀測量載體的角速度,工作時角速率信號經過高精度AD轉換後進入數位訊號處理單元,處理單元按照積分累加算法處理已經數位化的加速度信號,輸出相對於初始位置的角度增量值.提供一種測量任意軸上轉動角度的感測器,且動態測量下實時性與陀螺測角速度一致,增加了一種測角方案。附圖說明
圖1是陀螺及採集處理電路3D圖;圖2是系統供電模組電路3D圖。圖3是技術方案所依據的數學模型;圖4是系統原理框圖; 圖1
圖1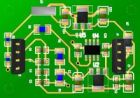 圖2
圖2 圖3
圖3 圖4
圖4具體實施方式
下面結合附圖和具體實施方式對本實用新型進行詳細說明。 第一部分:圖1中:gyro是能感應載體角速度的微機械陀螺儀CRS03-02.…… 圖2中:U5是線性電源模組為陀螺提供高質量的供電ASM117.…… 第二部分:陀螺是測量載體的角速度,要實時測得載體的旋轉角度,依據微積分原理,在微小的時間段內認為角速度值是恆定的,角速度乘以時間就是微小時間段內的角度值,將微小時間 段內的角度值相加就是連續時間段內的角度值.如圖3所示,f(x)為角速度隨時間變化曲線,M和N時間點之間角速度認為是恆定的,所圍成的面積就是M-N時間段內的角度值 ,總面積就是各個小面積之和. 第三部分:如圖4所示,系統上電後陀螺儀感應載體角速度並輸出與角速度成正比的模擬電壓信號,該信號通過24位AD採集後經過濾波得到數字量的角速度信號,單片機通過定時器每 隔10ms取一個當前的角速度信號,用該角速度信號乘以10ms間隔得到10ms內角度的變化量,不斷累加通過串口輸出從開機開始至當前的角度變化值.名稱:陀螺測角儀HT-CJY-100一.簡介:陀螺測角儀是一款可以同時輸出角速度及角增量的角度測量儀器。測角儀內置MEMS角速度感測器,通過24位高精度AD量化角速度信號,運用濾波算法處理量化後的信號,實時輸出高精度的角速度值及角增量值。根據用戶動態角度測量的需求,我公司特研發一款新型的陀螺積分測角儀,型號為:HT—CJY-100。
主要技術參數
1.物理參數
序號參數典型值1供電電壓DC9V(7-15V)
2消耗電流85mA
3工作溫度–40°Cto+85°C
4振動2grms(20Hzto2kHz,random)5衝擊200g(1ms,1sine)
6尺寸98*55*36mm
7重量240g
2.角速度部分
序號參數典型值1測量範圍±100°/s
2比例係數20mV/°/s
3非線性<±0.5%offullscale
4頻寬20Hz
5靜態噪音<1mVrms(3Hzto10Hz)
6溫度漂移<±3°/s
7隨機漂移<±0.55°/sinany30speriod
3.角增量部分
序號參數典型值1測量範圍0-360°
2保持精度1°(Within3Min)
3測量精度0.1°(0.05°和0.001°可選)
4頻寬20Hz
