說明
不同的自動控制系統,其物理結構不同,但從系統的數學模型來看,一般可將自動控制系統看作由若干個典型環節(比例環節、慣性環節、積分環節、微分環節、振盪環節以及時滯環節等)組成,研究和掌握這些典型的特性有助於對系統性能的研究。
微分方程
比例環節的微分方程為: c(t)=Kr(t)
式中,K為放大倍數。
傳遞函式G(s)
對比例環節的微分方程進行拉普拉斯變換,得: C(s)=KR(s)
因此,比例環節的傳遞函式為: G(s)=C(s)/R(s)=K
方框圖
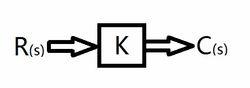 比例環節方框圖
比例環節方框圖可用方框圖來表示一個比例環節,如右圖。
實例
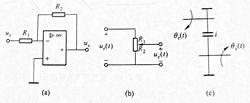 比例環節
比例環節右圖:
(a)為運算放大器構成的比例環節,其中K=R2/R1;
(b)為線性電位器,其中K=R2/(R1+R2);
(c)為傳動齒輪,其中K=i,i為傳動比。
