
基本簡介
據國外媒體報導,機器人星際艦隊可能在未來到達土星的衛星土衛六。到那時,機器人艦隊將不斷穿梭在土衛六高山、沙丘和湖泊間,自主完成探索任務。
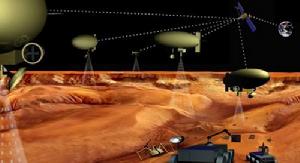 人造衛星、登入器和小飛船在共同工作藝術圖
人造衛星、登入器和小飛船在共同工作藝術圖技術背景
帕薩迪納加州理工學院的訪問學者沃爾夫岡·芬克(Wolfgang Fink)副教授指出,人類在行星探索技術方面正在發生巨大的轉變,下一輪機器人探索行星的方式將和我們當前看到的大不一樣。芬克最近已被特聘為圖森市亞利桑那大學微電子學教授。
探索任務
芬克說:“我們未來探索行星的方式將和以前大不一樣。傳統做法是傳送一個由地球指揮的宇宙飛船。未來我們將同時傳送多個成本便宜的機器人,它們可以同時到達不同的地方,完成艱巨的探索任務。 據悉,加州理工學院、美國地質調查局以及美國亞利桑那大學的研究人員正在努力開發軟體,並已經建立一個機器人試驗平台,這個機器人實驗平台模仿探索現場的地質學家和太空人,“獨立”開展工作。正在開發的這套軟體可以讓機器人自主思考,並自主確定觀察的優先地點和目標。
探索方案
而的外星探索方式是工程師傳送飛行器或太空飛行器來開展某項工作,然後等待它們完成。太空飛行器對於變化的外界環境還是按部就班,沒有一丁點靈活性。
芬克說:“在將來,機器人艦隊將發揮出自身的主觀能動性。”這些機器人將實時共享信息。未來可能將這種技術用於土衛六、火星或其它的行星探索上。現在,有關探索土衛六的建議方案是運用人造衛星、飛船以及登入器。
在這個探索方案綱要中,環繞土衛六大的一個人造衛星將對土衛六進行全面觀察,漂浮在土衛六上空的飛船可以鳥瞰其高山、湖泊和峽谷。在土衛六地面上,利用一個登入器可以探索其每個角落。人造衛星可以和飛船直接“通話”,命令它飛到某個地點進行仔細觀察。空中飛船將和土衛六地面的登入器聯絡,並命令它們到達之前已經觀察完畢的地點。
在新探索技術中,登入器可以報告地面的具體情況,飛船或者人造衛星可以確認登入器是否處在乾涸的河床上。而現在的技術只能提供全貌,而不能夠提供細節的信息,以便讓登陸器可以停靠在乾涸的河床中央。
芬克說:”我們正在朝著用機器人指揮機器人的目標前進。機器人艦隊在將來可以自主指揮。這些機器人艦隊在土衛六的空中和地面上,仿佛是我們身體不可或缺的一部分,不需要我們干預就可以對環境作出反應,並探索宇宙中未知的東西。”
據悉,關於這個外星探索新技術的文章已經發表在《生物醫學的計算機方法與程式》以及《國際光學工程學會學報》上。
