
歷史
2009 年,中國在開展探月二期工程實施的同時,為銜接探月工程一、二期,兼顧未來載人登月和深空探測發展,中國正式啟動了探月三期工程的方案論證和預先研究。嫦娥二號和嫦娥三號分別在2010年與2013年成功發射,中國探月二期工程目標基本完成。三期工程於2011年立項,將在2017年發射嫦娥五號探測器,任務目標是實現月面無人採樣返回。為了突破和掌握月球探測器再入返回地球的關鍵技術,中國決定先期實施再入返回飛行試驗,用於對未來嫦娥五號返回的相關關鍵技術進行試驗驗證。
結構參數
總體描述
月地高速再入返回飛行器由返回器和服務艙組成,包含結構、機構、熱控、供配電、數管、測控數傳、天線、GNC、推進、回收和工程參數測量11個分系統。
基本構型
月地高速再入返回飛行器共有發射狀態、太陽翼展開後在軌飛行狀態、艙器分離後服務艙在軌飛行狀態和返回器在軌飛行狀態及返回器開傘後在軌飛行狀態四種基本構型。
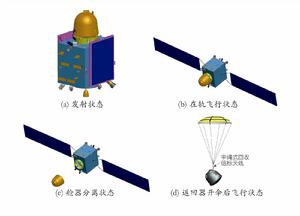 飛行器四種基本構型
飛行器四種基本構型技術參數
| 項目 | 指標 | 項目 | 指標 |
| 發射質量 | 不大於2450 kg | 再入角 | -5.8°±0.2° |
| 發射狀態包絡直徑 | 3200 mm | 再入航程 | 5600~7100 km |
| 發射狀態高度 | 4216 mm | 可靠性 | 不小於0.85 |
| 軌道 | 月地自由返回軌道 軌道進入方式:直接進入 返回再入軌道傾角:45±0.1° | 橫向/縱向基頻 | 分別大於10 Hz/30 Hz |
| 再入速度 | 10.66±0.05 km/s | 在軌飛行時間 | 不小於3 個月 |
| 備註 | 資料來源: | ||
服務艙
月地高速再入返回飛行器服務艙以嫦娥二號衛星平台,即改進的東方紅三號衛星平台為基礎進行適應性改進設計研製,具備留軌開展科研試驗功能。
技術參數
| 項目 | 指標 | 項目 | 指標 |
| 服務艙重量 | 不大於2115 kg | 推進劑攜帶量 | 1065 kg |
| 服務艙最大包絡直徑 | 不大於Φ3650 mm | 服務艙測控體制 | USB+VLBI |
| 服務艙母線輸出電壓 | 29±1 V | 服務艙遙控碼速率 | 125 bps |
| 太陽電池陣輸出功率 | 不小於1600 W (光照期) | 服務艙遙測碼速率 | 512/1024 bps (信道編碼後) |
| 姿態控制精度 | 對日定向時:+X/-X 軸與太陽矢量之間的夾角小於6° 軌道機動時:滾動、俯仰方向0.6°, 偏航方向0.9° 艙器分離時, 姿控精度:優於1.0°(各向) | 服務艙數傳碼速率 | 6, 3 Mbps, 23.4375 kbps |
| 備註 | 資料來源: | ||
返回器
月地高速再入返回飛行器返回器為新研產品,外形與中國神舟飛船返回艙類似,與探月三期正式任務中嫦娥五號返回器的狀態基本一致。
構型布局
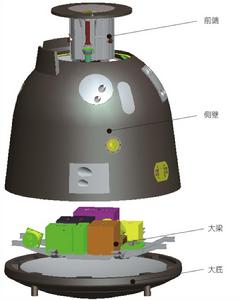 返回器構型分解示意圖
返回器構型分解示意圖•大梁結構安裝在返回器內部,將大樑上的設備與艙外惡劣的環境隔離;大梁採用“井”字梁形式;將主要電子設備布置在大樑上,實現集中的熱管理與電纜布線設計,減少轉接電纜及其安裝支架;
•側壁結構為返回器結構外形的主體,其外側為防熱結構,內側為金屬結構,將推進系統、回收系統、天線系統集中布置在側壁上,有利於提高推力器的力臂、保證天線的視場和出傘通道的安全,避免跨艙段間的狀態設定;
•大底結構在整器的最下部,主要用於承受高速再入返回過程中的力熱環境和著陸衝擊過程中的衝擊載荷,大底結構不安裝任何設備,提高系統的可靠性,
•由於前端結構距離返回器著陸衝擊受力點較遠,前端安裝有樣品容器艙;
•將環路熱管的蒸發器布置在大梁,冷凝器布置在側壁,可以保證將大樑上密集設備工作產生的熱量傳導到側壁散熱面,環路熱管整體取樣、安裝,在整器分合艙時拆裝大樑上管路及蒸發器,保證環路熱管的漏率和在軌使用安全。
技術參數
| 項目 | 指標 | 項目 | 指標 |
| 返回器重量 | 不大於335 kg | 返回器遙測碼速率 | 4/32 kbps(編碼後) |
| 有效容積 | 0.9 m | 返回器數據存儲容量 | 不小於3.2 Gbits |
| 返回器氣動外形升阻比 | 不小於0.2 | 開傘點地面高度 | 不低於10 km |
| 再入過載 | 不大於7g | 垂直著陸速度 | 不大於13 m/s |
| 返回器母線輸出電壓 | 28±3 V | 返回落點範圍 | 航向±95, 橫向±55 km |
| 蓄電池容量 | 40 Ah | 落地回收重量 | 不小於310 kg |
| 返回器測控體制 | USB+著陸標位243 信標+衛星救援示位標 | ||
| 返回器遙控碼速率 | 1 kbps | ||
| 備註 | 資料來源: | ||
搭載物品
| 類別 | 內容 | 類別 | 內容 |
| 音樂(存儲於“中國夢音樂晶片”) | 彭麗媛《在希望的田野上》 戴玉強、魏松、莫華倫《我像雪花天上來》 譚盾《天地人》 郎朗《春節序曲》 呂思清《梁祝小提琴協奏曲》 王健《巴赫第一前奏曲》 劉德海《十面埋伏》 李祥霆《流水》 袁莎《出水蓮》 宋飛《二泉映月》 | 繪畫 | 曹俊《尋夢空間》 |
| 玉雕 | 翟倚衛玉雕作品 | ||
| 其它 | 大清龍票 光明乳業4種菌株 安琪食品公司廣式月餅 | ||
| 備註 | 資料來源: | ||
艙器連線
接口
服務艙通過四套火工鎖實現與返回器的連線、解鎖。服務艙通過四套彈簧分離推桿實現與返回器分離;
整器狀態下,服務艙與返回器之間通過壓緊的電分離擺桿機構及快速分離電連線器實現電氣連線。在艙器聯合飛行階段,服務艙為返回器供電。分離前通過切換開關轉為返回器蓄電池組供電。在艙器聯合飛行階段,通過穿艙1553B匯流排實現艙器間信息交換;當艙器分離時,通過服務艙匯流排開關實現匯流排變結構切換;
服務艙與返回器採用隔熱設計,返回器支架與服務艙的連線面採用隔熱墊進行隔熱。
並行運行
艙器協同工作實現返回器慣性測量單元標定,提高返回器導航精度;
艙器聯合建立返回器分離狀態。利用服務艙完成返回器分離狀態建立所需指令和數據注入,並完成返回器下行遙測及艙器分離狀況圖像監視傳輸;
艙器聯合工作期間,將服務艙測控信道作為與地面站通信的主要通道,提供在軌測控服務,服務艙接收並轉發地面站上行的返回器信息及來自返回器的下行遙測信息;也可以利用返回器上行測控信道接收地面站上行注入的服務艙指令數據並轉發給服務艙。
研製過程
從2009 年7月開始,中國空間技術研究院組織開展了探月工程三期探測器系統及月地高速再入返回飛行器的相關關鍵技術的預先研究。
關鍵技術攻關與方案設計階段
月地高速再入返回飛行器於2011年1月獲得國家批覆立項至2012年6月間完成了關鍵技術攻關和方案研製工作。主要完成了飛行器指標論證、頂層規範制定、服務平台選型、總體方案設計、關鍵技術攻關、重要單機試製及整器技術狀態基線的確定等工作,給出合理可行的技術方案。
初樣階段
月地高速再入返回飛行器於2012年7月至2013年12月完成了初樣階段的研製工作。主要開展了初樣詳細設計、初樣產品研製、電性器、結構器、熱控器與輻射模型器的總裝與試驗驗證、專項試驗驗證、技術風險識別與控制、新工藝和新產品鑑定、系統級和分系統級試驗驗證等工作,驗證初樣設計的正確性。此外,初樣階段還開展了正樣先行件的研製。
 飛行器進行真空熱試驗
飛行器進行真空熱試驗正樣階段
月地高速再入返回飛行器於2014 年1月至2014年10月完成了正樣階段的研製工作。主要開展了正樣詳細設計、正樣產品研製、分系統級試驗驗證、正樣器總裝廠總裝與試驗驗證、專項試驗驗證、技術風險識別與控制、故障預案設計及演練、發射場總裝與測試等工作,對飛行器器上產品功能性能進行了測試和驗證。
任務歷程
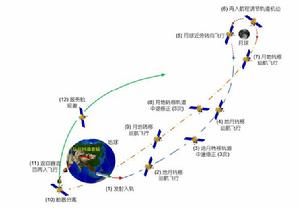 月地高速再入返回飛行器飛行過程
月地高速再入返回飛行器飛行過程月地高速再入返回飛行器飛行過程劃分為6個飛行階段,分別為 發射段、 地月轉移段、 月球近旁轉向段、 月地轉移段、 再入返回段和 回收著陸段。
發射
 搭載飛行器的長征三號丙起飛
搭載飛行器的長征三號丙起飛2014年10月24日2時,月地高速再入返回飛行器由長征三號丙改II型運載火箭發射。與飛行器一起升空的還有盧森堡LuxSpace公司製造的4M無線電信標。
發射屬於降軌發射,飛行器在發射階段由結構承受主動段載荷,器上設備處於主動段工作模式。
星箭分離後月地高速再入返回飛行器進入近地點高度為209公里、遠地點高度41.3萬公里、軌道傾角28.5°的地月轉移軌道。
| 台北時間 | 飛行節點 | 理論時間(秒) | 實際時間(秒) |
| 點火 | |||
| 10月24日2:00 | 起飛 | 0 | 0 |
| 助推器分離 | 139.920 | 137.705 | |
| 一二級分離 | 158.968 | 159.286 | |
| 拋整流罩 | 272.968 | 269.719 | |
| 二三級分離 | 343.768 | 344.068 | |
| 三級一次關機 | 624.018 | 624.318 | |
| 三級二次點火 | 829.168 | 829.183 | |
| 三級二次關機 | 1004.910 | 1006.984 | |
| 末速修正結束 | 1025.110 | 1026.706 | |
| 10月24日2:18 | 器箭分離 | 1105.110 | 1106.711 |
| 資料來源 | |||
地月轉移
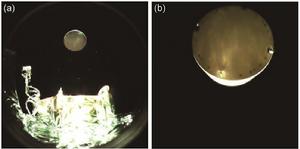
 距地31萬千米雙解析度相機窄視場拍攝的地球
距地31萬千米雙解析度相機窄視場拍攝的地球地月轉移段是指從器箭分離開始到飛行器到達距離月球約66200km的影響球邊界為止的飛行階段。全過程飛行時間約81小時,完成對日定向、太陽翼展開、服務艙推力器標定、返回器GNC分系統IMU標定試驗、新技術試驗和三次軌道中途修正(第一-三次)。實際飛行過程只進行了第一和第二次軌道修正,第三次取消。
月球近旁轉向
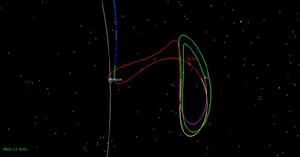
 距月球1.3萬千米雙解析度相機拍攝月地合影
距月球1.3萬千米雙解析度相機拍攝月地合影月球近旁轉向段是指從飛行器進入月球影響球開始到飛行器飛出月球影響球為止的飛行階段。飛行器在該段藉助月球引力改變自身相對地球的軌道傾角,同時開展新技術試驗任務,全過程飛行時間約32小時。
月地高速再入返回飛行器在月球近旁轉向段藉助地球引力改變軌道傾角,傾角改變數超過70°,從設計上減少了一次依靠大推力長時間軌控改變傾角的需求。
實際任務中,台北時間10月27日11時30分左右,再入返回飛行器飛抵距月球6萬公里附近,進入月球引力影響球,開始月球近旁轉向飛行。28日凌晨3時,試驗器到達距月面約1.2萬公里的近月點,隨後,在北京航天飛行控制中心控制下,飛行試驗器系統啟動多台相機對月球、地球進行多次拍攝,獲取了清晰的地球、月球和地月合影圖像。
月地轉移
月地轉移段是指飛行器從飛出月球影響球開始到艙器分離的飛行階段。飛行器在該段完成返回器GNC分系統IMU 標定、新技術試驗和三次軌道中途修正(第四-六次),並根據需要進行再入航程調整,同時完成返回器與服務艙分離的準備工作,全過程飛行時間約83小時。
台北時間10月28日19時40分左右,再入返回飛行器離開月球引力影響球,進入月地轉移軌道。 月地轉移階段實際只進行了第五次軌道修正,第四,六次取消。完成第五次中途修正後返回器再入角偏差0.024°,再入點處軌道傾角偏差0.004°,實現了高精度再入走廊進入。
艙器分離
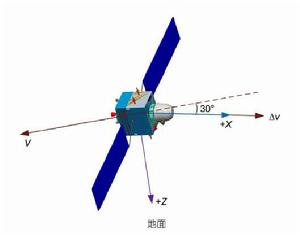 器艙分離時飛行姿態
器艙分離時飛行姿態月地高速再入返回飛行器在月地轉移過程至艙器分離點時,進行服務艙和返回器分離。艙器分離過程的工作程式如下:
分離前40min,飛行器調姿機動,建立艙器分離姿態。飛行器+X 軸指向飛行反方向,與飛行速度負方向的夾角為30°,指向地球一側。
分離前10min,返回器由自身攜帶的蓄電池提供整器電源,做好艙器分離準備。
分離前5min,服務艙照明燈打開,分離監視相機工作,開始執行分離監視程式。
艙器分離前返回器GNC完成導航建立,為艙器分離後慣性導航提供初始導航數據。
服務艙傳送電分離擺桿擺開指令,實現電分離。起爆電分離擺桿機構上的壓緊釋放火工裝置,之後在分離彈簧的作用下分離擺桿擺開,從而實現快速分離電連線器斷路。
電分離擺桿擺開指令發出625ms後,服務艙數管傳送火工鎖解鎖指令,實現艙器機械分離。
返回器GNC分系統根據採集的電分離信號以及數管轉發的機械分離信號和電分離信號,採取三取二的方式判斷艙器分離情況,確認分離後延時4s啟控。
1.分離前40min,飛行器調姿機動,建立艙器分離姿態。飛行器+X 軸指向飛行反方向,與飛行速度負方向的夾角為30°,指向地球一側。
2.分離前10min,返回器由自身攜帶的蓄電池提供整器電源,做好艙器分離準備。
3.分離前5min,服務艙照明燈打開,分離監視相機工作,開始執行分離監視程式。
4.艙器分離前返回器GNC完成導航建立,為艙器分離後慣性導航提供初始導航數據。
5.服務艙傳送電分離擺桿擺開指令,實現電分離。起爆電分離擺桿機構上的壓緊釋放火工裝置,之後在分離彈簧的作用下分離擺桿擺開,從而實現快速分離電連線器斷路。
6.電分離擺桿擺開指令發出625ms後,服務艙數管傳送火工鎖解鎖指令,實現艙器機械分離。
7.返回器GNC分系統根據採集的電分離信號以及數管轉發的機械分離信號和電分離信號,採取三取二的方式判斷艙器分離情況,確認分離後延時4s啟控。
 艙器分離過程A,B監視相機圖像
艙器分離過程A,B監視相機圖像為保證服務艙在分離後快速、可靠規避,將飛行器在月地轉移過程至距地面約5000km高度處設為艙器分離點。
實際工作中,2014年11月1日5時53分44秒,服務艙和返回器分離。艙器分離前40分鐘,月地高速再入返回飛行器完成了分離姿態建立,姿態偏差小於0.1°。艙器分離過程中,返回器三軸姿態角速度小於0.6°/s,分離相對速度為0.591m/s。
服務艙規避機動
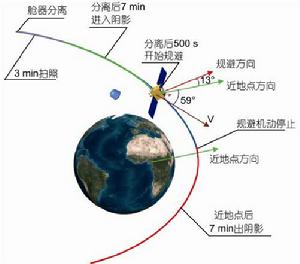 服務艙規避機動過程示意
服務艙規避機動過程示意為保證艙器分離後返回器的飛行安全且能夠利用服務艙繼續進行拓展試驗任務,艙器分離後利用服務艙實施規避機動,將服務艙飛行軌道的近地點高度由約60抬升至130km以上的安全高度。
實際任務中,服務艙在艙器分離後成功實現規避機動,規避完成後服務艙近地點高度為138km,服務艙成功拉起,繼續開展在軌試驗。
再入返回
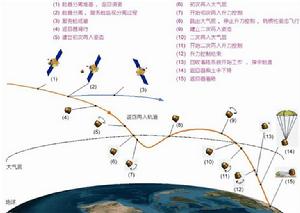 再入返回飛行過程示意圖
再入返回飛行過程示意圖| 項目 | 指標 | 項目 | 指標 |
| 再入點軌道傾角 | 45°(相對地球固連繫) | 再入角 | -5.8° |
| 再入點高度 | 120 km | 地球返回軌道類型 | 升軌返回 |
| 備註 | 資料來源: | ||
再入返回段是指月地高速再入返回飛行器從艙器分離點到返回器彈射開傘的飛行階段。返回器在該階段首先滑行飛行,並以再入姿態進入地球大氣層。其後採用 半彈道跳躍式方式飛行,到達開傘高度時自主開傘。全過程飛行時間約40min。從艙器分離後到10km開傘點,返回器再入返回分為4 個階段:
從艙器分離點至返回器距地面120 km 高度的 自由飛行階段,艙器分離後建立並保持飛行姿態。從艙器分離點至返回器距地面300 km 高度的飛行過程中,確保返回器衛星導航信號天線指向天頂,距地面高度300 km 處建立配平姿態,做好再入大氣的準備。
返回器從距地120 km 再入大氣至重新跳出大氣層的 一次再入段,返回器通過大氣減速,降低返回器飛行能量,同時通過防熱材料燒蝕帶走產生的熱能,一次再入過程中返回器通過升力控制,保證返回器二次再入大氣的再入點狀態滿足二次再入走廊的要求。
返回器跳出大氣層至二次進入大氣層的 跳出階段,返回器沿克卜勒軌道飛行,通過一次再入過程控制該階段的飛行路徑來調整再入航程。返回器在該階段完成一次再入大氣過程的數據下傳,在衛星導航可用的情況下完成對返回器GNC導航偏差的修正。
返回器二次再入大氣層至距地面10 km 高度開傘點的 二次再入段,返回器進一步減速,降低飛行能量,通過防熱材料進一步燒蝕帶走產生的熱能。返回器通過升力控制保證返回器開傘點精度,在開傘時控制返回器飛行姿態滿足開傘要求,確保正常開傘。
| 項目 | 實測結果 | 項目 | 實測結果 |
| 再入過程過載 | 最大過載小於5g | 防熱燒蝕 | 返回器結構表面平整、平滑, 表面開孔、凹坑、縫隙、突 起物等燒蝕狀態良好, 燒蝕情況符合預期, 氣動外形滿 足要求. |
| 內壁溫度 | 返回器著陸時刻金屬結構內壁最高溫度28.5℃, 最大溫升 76.4℃. | 開傘點精度 | 偏差量509 m |
| 備註 | 資料來源: | ||
月地高速再入返回飛行器採用半彈道跳躍式返回,因為跳躍式返回可以通過增加飛行距離的方式減小過載和總熱流,降低對返回艙結構強度和熱控方面的壓力,使過載限制在人體可接受的範圍內。
其次,在選擇嫦娥五號主著陸場時,中國航天專家曾提出著陸於中國西南地區,但後來考慮西南地域山區多,擔心嫦娥五號帶回的樣品落地後難以尋找,另外中國太空飛行器過去傳統的降落地點是在內蒙草原,所以著陸場最終選擇在北部草原地區。返回艙需要飛行更遠的距離才能著陸,而跳躍式再入恰恰可以滿足延長再入路徑,使返回艙落到理想降落地點的要求。
回收著陸
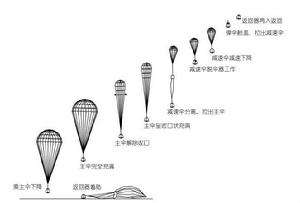 回收著陸過程示意圖
回收著陸過程示意圖 返回器著陸現場
返回器著陸現場回收著陸段是指返回器從彈射開傘開始到著陸並成功回收為止的飛行階段。其中由彈射開傘至返回器著陸的飛行時間約10min,返回器著陸後回收信標的最長工作時間為48小時。回收著陸過程中返回器依次完成減速傘和主傘的拉出和展開,通過降落傘進一步減速,返回器按照預定的速度安全著陸,自主開啟回收信標和衛星救援示位標,做好回收準備。
2014年11月1日6時42分,再入返回飛行器返回器在內蒙古中部區域著陸。7時,中探月工程總指揮許達哲在北京航天飛行控制中心宣布中國探月工程三期再入返回飛行試驗獲得成功。
| 項目 | 實測結果 | 項目 | 實測結果 |
| 開傘高度(km) | 11.29 | 著陸速度(m/s) | 11.7 |
| 開傘軸向過載(g) | 最大開傘過載小於5 | 落點精度(km) | 偏差量2.92 |
| 備註 | 資料來源: | ||
擴展任務
第一階段
 距地54萬千米雙解析度相機拍攝地月合影
距地54萬千米雙解析度相機拍攝地月合影月地高速再入返回飛行器服務艙在2014年11月1日與返回器分離後,經過兩次軌道控制,返回到遠地點54萬千米、近地點600千米的大橢圓軌道,開展拓展試驗任務。
2014年11月9日和17日服務艙先後完成繞地大橢圓軌道遠地點變軌控制和近地點變軌控制,進入地月轉移軌道飛行。11月21日實施了地月轉移軌道中途修正控制,11月23日到達近月點,並實施月球借力軌道機動控制,飛向地月系統拉格朗日2點(稱地月L2點)。
 服務艙在地月L2點繞飛軌道
服務艙在地月L2點繞飛軌道11月27日,服務艙進入環繞地月L2點的李薩如軌道進行探測,軌道振幅X軸2萬公里,Y軸4萬公里,Z軸3.5萬公里,周期14天。 為保持在環繞地月L2點的李薩如軌道,11月28日、12月1日、12月26日服務艙分別實施了三次軌道維持控制。
2014年1月4日,完成繞地月L2點三圈環繞飛行後,服務艙飛離地月L2點,2015年1月11日到達近月點,實施第一次近月制動;1月12日、13日分別進行了第二次、第三次近月制動,進入高度200公里的環月圓軌道。
第二階段
2015年2月6日,服務艙在環月軌道上開始進行調相實驗,第二階段拓展試驗展開。在此過程中服務艙模擬嫦娥五號著陸器月面採樣期間軌道器的飛行控制過程,驗證軌道設計、飛控時序、軌道精度等相關技術項目。
調相試驗分別於2月6日和7日開展了三次。第一次調整服務艙在軌道上的運行速度,進入調相軌道運行;第二次調整近月點高度;第三次圓化軌道。
第三階段
第三階段試驗於2015年3月3日至7日進行,服務艙擬作嫦娥五號上升器,模擬與軌道器在月球軌道交會對接之前的飛行控制過程,驗證嫦娥五號上升器遠程導引控制策略、天地協同控制時序、軌道測量與飛行控制精度等相關技術,獲取試驗數據和經驗,評估軌道設計和交會方案。
3月3日至7日間,首先通過三次控制,將服務艙飛行軌道由200公里環月圓軌道降低至近月點18公里、遠月點180公里的軌道;然後進行四次遠程導引控制,模擬嫦娥五號上升器由距離月面18公里處開始,通過不斷調整姿態和軌道,追趕軌道器,最終飛行至適合於兩器交會對接位置的過程。
後續工作
 工作人員取出返回艙搭載物品
工作人員取出返回艙搭載物品2014年11月2日上午舉行了中國探月工程三期再入返回飛行試驗返回器交接儀式和開倉儀式,全部搭載物品順利取出。
