
基本信息
我國的製造業在國民經濟中有著極其重要的地位,而生產自動化的程度與已開發國家相比還有著較大的差距,同時也蘊藏著很大的發展空間。隨著近年來人力成本的大幅上升,依靠廉價勞動力獲得市場競爭優勢的模式不可持續。以IT代工界企業富士康為例,工人不斷重複同一個的動作,工作枯燥且壓力大。公司目前表示將大力推進自動化設備的套用,將單調、勞動力強、重複性及危險和污染性強的崗位交給自動化機械 。
自動化裝配設備的結構以在多自由度運動平台上安裝不同工作頭的形式為主。傳統的運動平台中,直線運動通常由作旋轉運動的伺服電機通過滾珠絲槓轉換成直線運動,繞該軸的轉動由另一台電機通過電機軸直接驅動或通過某種傳動鏈間接驅動。兩個運動方向上的位置檢測都是由電機軸帶動的旋轉編碼器實現,並且經由傳動機構的運動通常只能作半閉環控制。這種通過絲槓作為動鏈的方式在運動速度上難以提高,半閉環的運動控制在精度上有較大的局限性。由傳統伺服電機搭建的運動平台系統慣量大,不適合高速運動的需求。兩個自由度分別由兩台電機控制的方式也使得裝配過程複雜,占據空間大 。
電子設備裝配的特點之一是生產量大,因此,對運動平台的運動速度了較高的要求。半導體封裝行業中,不僅對運動平台的速度了較高的要求,運動精度也必須有保障。如Miihlbauer公司的生產的貼片機,其4自由度的運動平台可在800mm的範圍內實現每小時4萬次的定位。即每次定位的時間小於90ms,其末端執行器的定位精度能達到±20m。生產效率是企業生存的關鍵。為實現運動平台的高速度運動,必須縮短傳動鏈,減少系統慣量。因此直接驅動技術,成為高速運動平台的理想解決方案。
音圈電機是一種直接驅動型電機,其動子可以直接生成直線運動或是旋轉運動,而不需任何中間傳動機構。甚至可以直接將動作執行器作為電機的動子,實現零傳動、全閉環控制。由於音圈電機運動精度高、回響時間短、系統慣量小,在行程較短、負載較輕、精密高速的自動化設備中套用廣泛
音圈電機通常採用無鐵芯的機械結構,這樣的結構給運動控制帶來諸多優點。由於沒有鐵芯,在電樞電流方向變化時可以認為沒有剩磁,音圈電機的輸出推力正比於電樞電流,線性度高。因此可以做到推力平穩、光滑,適用於力控制模式。無鐵芯機構也使得動子慣量小,相比傳統電機,有著極高的伺服頻寬。
由於音圈電機在套用中不需要傳動設備,使得其工作中所受摩擦力僅僅來自於導軌的摩擦。這使得音圈電機系統具有極低的阻尼比。音圈電機的直流驅動方式的決定了當動子處在目標位置時,電樞平均電流為零,即無偏差時,也不存在保持力或保持力矩。動子總是圍繞目標位置作高頻微幅擺動。這樣的控制方式使音圈電機每時每刻都處在運動中,消除了靜摩擦,這種特性在短行程高速度,啟停頻繁的場合顯得尤為重要。
在其他的生產行業中,凡是對速度要求高,負載不大的場合,均適用於音圈電機的套用。如電子元器件的生產,電路板上元件的焊接,MEMS器件的裝配,LED各生產工藝過程,如點膠、焊線、分裝、檢測等。
總之,市場對高速伺服運動設備需求旺盛,而能滿足市場需求的成熟產品種類還相對稀缺。研製這樣一種符合市場需求的產品有著廣闊的套用前景。
研究現狀
音圈電機以其工作原理與揚聲器相同而得名,通電導線在磁場中受安培力的作用,安培力的方向可由左手定則判定。音圈電機正是基於安培力設計而成的一種直接驅動型電機。
音圈電機的發展得益於硬碟對機械運動速度需求,早期的硬碟使用步進電機作為磁頭驅動器,1966年IBM公司製造的磁頭臂和小車驅動系統中首次套用圈電機在2314型磁碟機上。由此,音圈電機在運行理論、結構設計和控制理論方面獲得了飛速發展。雖然音圈電機起步較晚,但以其卓越的性能得到了廣泛的套用。
2007年的諾貝爾物理學獎授予給巨磁電阻效應的發現者Albert Fert和Peter Griinberg。巨磁電阻效應的套用革新了硬碟中存取數據的技術,首次使用該技術的硬碟由IBM公司在1997年推向市場,接下來的十年,硬碟的信息存儲密度幾乎每年翻一番。信息存儲密提升使硬碟磁軌越來越密,對帶動磁頭運動的音圈電機定位精度需求越來越高。目前一款普通商業用硬碟己經可以達到單碟1TB,要實現這個目標,須將340000個磁軌的寬度壓縮在1英寸之內。這意味著,在讀寫數據時,音圈電機帶動磁頭必須沿著僅75納米寬的磁軌精確運行。
在2008年的國際自動化控制及機器視覺會議中,Yongdae Kim等人展示的用於顯微鏡的音圈電機驅動的微型XY平台。
在這套系統中,使用了彈簧片作為柔性鉸鏈,電容式位移感測器作為位置反饋,模擬PID控制器和集成運放組成驅動器,增加了電渦流阻尼器提供系統阻尼後,調節時間可以縮短到8ms。
音圈電機工作原理
音圈電機產生運動的原理與揚聲器相同,通電導線在磁場中受到的安培力是動子動力的來源。受力方向由左手定則判定,安培力的大小為:
在均勻氣隙磁場中放入線圈繞組,繞線方向垂直於勻強磁場方向。繞組中有電流通過時產生安培力帶動負載作往復運動,通過改變電流的強弱和方向,就可改變安培力的大小和方向。根據磁場結構不同音圈電機運動形式可以是直線或者圓弧
磁路形式選擇
音圈電機常用在多自由度運動平台的最後一級。因此除了音圈電機本身要求具有高速回響的能力外,電機本身的質量和體積應儘量小,以提高整個運動平台的高速運動能力。通常,用以生成定子磁場的材料密度較大,定子結構在電機質量中占比較大磁路結構應選擇用儘量少的永磁體和導磁材料生成磁通密度高的勻強磁場的結構
根據永磁體的位置、氣隙及線圈結構的不同。根據音圈電機外形不同,又可分為圓柱形、矩形和扇形等。其中矩形結構具有使用導磁材料少,結構緊湊,易於加工的特點,從而成為直線型音圈電機的理想選擇。
直線運動磁路結構
直線運動磁路部分原理,在矩形磁扼內,布置兩塊方向相反地永磁體,氣隙中可生成方向相反的近似勻強磁場。當線圈中的電流從上側磁場穿入,繞過中間部分磁扼從下側磁場穿出,由左手定則可知,線圈的上半部分和下半部分都受到方向向右的安培力,合力方向向右。當線圈中電流方向發生變化時,受力方向隨之改變。
旋轉運動磁路結構
旋轉音圈電機的磁路結構由直線運動的磁路結構進行弧形演化而來,其原理如圖2-4所示,將直線磁路下側的永磁體方向翻轉,則線圈受到繞磁扼中心點的力矩作用,然後將原來的平面狀的永磁體和磁扼替換為弧形,線圈即可繞磁扼中心點做旋轉運動。
主要套用
音圈電機結構簡單,控制容易,特點突出,已經在工業生產的各個領域獲得了廣泛套用。如雷射調焦系統,掃瞄器,照相機快,門振動試驗台,冷凍機的壓縮機等搖臂式音圈電機主要套用在計算機硬碟存儲中作為伺服尋道電機。世界燒結錢鐵硼總產量的60%用於生產此類電機。為了說明SA-VCM在硬碟中的作用和重要性,下面介紹硬碟的結構和基本工作原理。
硬碟主要由碟片、主軸組件、磁頭、磁頭傳動裝置和控制器印刷電路板五部分組成。
碟片是硬碟存儲數據的載體,傳統碟片大多採用金屬薄膜材料,這種金屬薄膜較軟碟的不連續顆粒載體具有更高的存儲密度、高剩磁及高矯頑力等優點。現在,製造商大多採用“玻璃陶瓷碟片”的材料作為碟片基質,這種碟片比金屬碟片剛度好,也不會隨溫度的變化由膨脹和收縮,在運行時具有更好的穩定性。碟片是完全平整的,簡直可以當鏡子使用。
控制電路板:大多數的控制電路板都採用貼片式焊接,它包括主軸調速電路、磁頭驅動與伺服定位電路、讀寫電路、控制與接口電路等。在電路板上還有一塊ROM晶片,裡面固化的程式可以進行硬碟的初始化,執行加電和啟動主軸電機,加電初始尋道、定位以及故障檢測等。在電路板上還安裝有容量不等的高速數據快取晶片。
磁頭組件:這個組件是硬碟中最精密的部位之一,它由讀寫磁頭、傳動臂、傳動軸三部份組成。磁頭是硬碟技術中最重要和關鍵的一環,實際上是集成工藝製成的多個磁頭的組合,它採用了非接觸式頭、盤結構,加電後在高速旋轉的磁碟表面移動,與碟片之間的間隙只有0.1 -0.3 um,這樣可以獲得很好的數據傳輸率。現在轉速為7200r/min的硬碟飛高一般都低於0. 3 um,以利於讀取較大的高信噪比信號,提供數據傳輸率的可靠性。
磁頭驅動機構:盤硬的尋道是靠移動磁頭,而移動磁頭則需要該機構驅動才能實現。磁頭驅動機構由電磁線圈電機、磁頭驅動小車、防震動裝置構成,高精度的輕型磁頭驅動機構能夠對磁頭進行正確的驅動和定位,並能在很短的時間內精確定位系統指令指定的磁軌。
主軸組件:主軸組件包括軸承和驅動電機等。隨著硬碟容量的擴大和速度的提高,主軸電機的速度也在不斷提升,有廠商開始採用精密機械工業的液態軸承電機技術FDB。採用FDB電機不僅可以使硬碟的工作噪音降低許多,而且還可以增加硬碟的工作穩定性。 工作過程是:當硬碟加電後,主軸電機以固定速度旋轉,產生的空氣動力使磁頭懸浮在碟片表面,音圈電機接受到讀寫信號運行,通過傳動臂帶動磁頭在碟片表面做徑向運動,並和預先刻在碟片上的伺服信號對比,確定是否達到所要尋取的磁軌。
基本原理
搖臂式音圈電機的結構概述圖所示 。
本節研究SA-VCM的磁場對電機性能的影響,使用有限元分析軟體計算電機的磁場分布,以此為基礎對電機的最佳化設計合理建議。由於電機中的磁場由永磁體決定,帶電線圈產生的磁場很小,可以忽略,主要考察永磁體的形狀和磁扼對氣隙中磁場的影響。
1有限元介紹
現在市場上有許多大型通用有限元分析軟體。它們能夠進行包括結構、熱、聲、流體、電磁學等學科的研究。在石油化工、太空梭、機械製造、能源、汽車交通、國防軍工、電子、土木工程、生物醫學、口用家電等領域有著廣泛的套用,並取得了成功。
有限元軟體程式的電磁分析軟體包可用來分析電磁場的多方面問題,如磁通量密度、磁場強度、磁通泄漏、電感、電容、阻抗、渦流、電場分布、磁力線、品質因數、特徵頻率、磁力和力矩、運動效應、電路和能量的損失等。並且提供了豐富的線性和非線性材料的表達方式,包括各種同性或正交各向異性的線性磁導率,材料的B-H曲線和永磁體的退磁曲線。後處理允許用戶顯示磁力線,磁通密度和磁場強度並進行力、力矩、感應係數、端電壓等參數的計算。
有限元軟體在磁場分析方面的功能有:2-D靜態磁場分析,2-D時諧磁場分析,2-D瞬態磁場分析、3-D靜態磁場分析、3-D靜態時諧瞬態磁場分析、高頻電磁場分析、電流場分析、靜電場分析等。
2二維磁場分析
為了直觀的顯示氣隙磁場,下面給出了所研究電機的平面圖和相關尺寸,並在有限元軟體中做了二維靜態磁場分析。
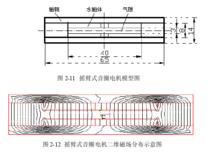 搖臂式音圈電機
搖臂式音圈電機選用的搖臂式音圈電機是昆騰3.5英寸系列硬碟驅動器中伺服驅動電機。其中永磁體是燒結錢鐵硼,上下各兩塊,分別為N, S極和S, N極,每塊磁體的長度為18mm 。磁扼由鎳鋼合金組成,上下各一塊,長度為65mm;厚度為2. Smm外沿半徑是43mm,內沿半徑是25mm;永磁體厚度為2mm,外沿半徑是42mm,內沿半徑是25mm,內外沿弧長所對圓心角為560度。永磁體是燒結錢鐵硼幾何形狀為馬蹄形,這種設計減少了漏磁,是氣隙磁場最大化。從圖2-12可以看出,氣隙中磁場基本均勻並且和線圈垂直。
3三維磁場分析
主要考察永磁體厚度、磁扼的相對磁導率和磁扼厚度對氣隙磁場的影響,得出結論對電機的設計合理建議。典型的有限元分析過程有三個步驟。1)建立模型2)載入並求解3)查看分析結果。下面結合實際的電機模型,進行氣隙磁場的仿真計算。
方案綜述
開環電壓控制方案
 搖臂式音圈電機
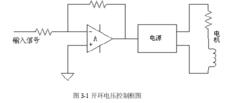
搖臂式音圈電機音圈電機使用初期,一般系統對精度和回響的快速性要求不高,而音圈電機本身的特點能滿足使用要求,所以對其控制方法的研究也不太深入,大多採用開環電壓模式來控制音圈電機,如圖3-1所示。
閉環電流控制方案
 搖臂式音圈電機
搖臂式音圈電機閉環電流控制是目前較成熟和普遍使用的控制方案。圖3-2是控制方案的方框 閉環電流控制有以下一些優點:
1、系統的魯棒性好:VCM線圈電抗和旋臂速度對動子線圈電流的影響被有效控制,可以忽略電機的動力學特性,對電機進行單獨且周密的設計。
2、輸出電流精度高:由於系統內在的快速回響及高度穩定性,反饋迴路增益可比一般系統的迴路增益高很多,而不致造成穩定性和迴路增益之間的矛盾,從而使輸出電流具有很高的靜態精度。
3、有內在的對功率開關電流的控制及限流能力。電感電流峰值(即流過功率開關的峰值電流)直接受誤差放大器輸出的電流給定信號所控制,在任何輸入電壓和負載的瞬態條件下,功率開關的峰值電流被限制在給定值。
閉環電流控制的最大缺點是功耗大,電路複雜,成本高;由於是模擬量控制,一些較先進的控制方法無法採用。
數字電壓控制方案
 搖臂式音圈電機
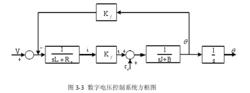
搖臂式音圈電機音圈電機的數字電壓控制系統主要組成部件有PMw電源、前置濾波器、功率放大器,數位訊號控制器DSP。其方框圖如圖3-3所示: 搖臂式音圈電機是一種將電能轉換為直線振盪運動機械能,而不需任何中間轉換機構的傳動裝置。是基於安培力原理製造的新型直線驅動電機。本課題中所研究的搖臂式音圈電機為硬碟中的磁頭驅動系統所採用的驅動電機。由於VCM的結構相對簡單,在設計製造時,可以將其加工到很小的體積;結構設計優良的VCM,其動圈行程內的磁力線均勻分布,使得動圈在工作行程範圍內受力均勻,這對精確控制非常有利。運用有限元分析方法,藉助有限元分析軟體,考察了電機的三維氣隙磁場分布。主要對永磁材料變化、永磁體厚度變化、磁扼材料變化、磁扼厚度變化等幾方面進行了研究,對電機的設計製造合理性建議。首先要選擇高性能永磁材料,這對電機的設計至關重要;目前採用燒結錢鐵硼。選擇永磁體時,其厚度至少應該大於2mm,至多不要超過6mm最佳厚度應該選擇在3-5mm,考慮實際硬碟的高度和製造成本,應該選擇靠近3mm處。在選擇磁扼時,應該採用普通輕質高強度導磁材料,而不必選擇如鎳鐵合金、坡莫合金等強導磁材料;這樣可以減輕電機重量,降低成本。磁扼厚度應該大於0.5mm,由於它的厚度對磁場影響較小,因此選取主要參考電機對機械強度的要求。考慮硬碟製作工藝,機械強度、重量等因素,厚度應該介於1 -3 mm之間。在磁扼合永磁體厚度綜合考慮時,應該儘可能增大永磁體厚度,同時也要考慮其製造成本。
