
CBR業務電路仿真規範
為了實現在ATM網路上傳送電路業務,即CBR業務,ATM Forum提出了電路仿真的規範,電路仿真業務(Circuit EmulationService,CES)的特點就是在ATM網路上提供與當前TDM技術類似的性能。
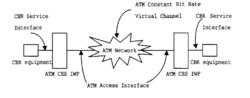 圖1
圖1圖1為電路仿真參考模型,CBR業務可通過網路互通功能(Interworking Function,IWF)接入ATM網路,並與其它CBR設備相連,ATM網路對於接入的CBR業務是透明的,就好象仍在原來傳統的電路網路中傳送一樣,這也是電路仿真的含義所在。
電路仿真支持的CBR業務包括結構化T1/Eln×64kbit/s業務及非結構化T1/El業務。結構化n×64kbit/s業務以部分式T1/El電路為模型,只傳遞實際需要的時隙,使占用的ATM頻寬最小,n×64kbit/s業務向用戶終端設備提供時鐘,適用於全同步網路的環境。另外由於n×64kbit/s業務終止於設備數據鏈路(Facility Data Link,FDL),它可以在IWF及用戶終端設備之間的T1/El鏈路提供準確的鏈路質量監視和故障隔離。非結構化T1/El業務以與網路異步的T1/El電路為模型,適用於用戶終端設備使用非標準的幀格式情況。在這種模式下,ATM網路以比特流的形式對電路上的數據業務透明傳榆,用戶終端設備產生定時信息,並由信元攜帶,經ATM網路傳送至接收端。非結構化T1/El業務側重於端到端設備的數據鏈路通信及告警,相對於結構化業務,它的配置要簡單易行。
 圖2
圖2n×64Kbits/s業務用於仿真點到點的部分T1/El電路,其典型接入方式是通過1.544Mbit/sTl接口及2.048Mbit/S G.703接口。對Tl,每個接口提供24個時隙中的n個時隙,n可以從l到24任選;對E1接口,n可以從1到3l任選。由於n×64Kbit/S業務只占用T1/El接口的部分時隙,所以可以在一個T1/El接口上共享幾個獨立的仿真電路,即由對應於不同虛連線(Virtual Channel Connection,VCC)的AALl實體完成相應的適配功能,其網路互通功能圖見圖2。
圖2a描述了結構化業務的網路互通功能。ATM UNI物理層接口為電路仿真業務提供足夠的頻寬,並通過此接口從ATM網路向CES網路互通功能單元提供定時信息,此定時信息同步於網路主參考源(Primary Reference Source,PRS)。ATM層負責多個VCC的復接和分接,每個VCC對應每個AALl實體,AALl實體負責虛連線的分段和重組(SAR)。時隙映射功能(MappingFunction)負責將輸入、輸出至SAR子層的數據流分配到相應T1/El電路的確定時隙中。在電路仿真中,VCC的時隙分配是由CES管理信息庫(Manage Information Base,MIB)完成的。分配的時隙在VCC的輸入、輸出接口上不需要完全一致,也不必是連續的,但要求其必須保持125us的幀完整性,即每個VCC的n個時隙需保持在同一個幀結構中。另外,要求同一幀中同一VCC的n個時隙,在輸入、輸出接口上保持其順序是一致的。
圖2b描述了非結構化業務的網路互通功能,此處的映射功能只簡單地將AALl層與T1/El業務接口的每一比特進行映射。從ATM觀點看,圖中的陰影部分代表了“AAL用戶實體” 。
CBR業務的源定時恢復
數字通信系統中,為了在接收方恢復出與傳送源一致的數位訊號,要保證收發雙方的比特時鐘具有一致的頻率和相位關係。在電路網路中,收發時鐘不同步將會導致接收方取樣判決的錯誤;在ATM網路中,如果收發時鐘不同步,同樣將導致傳送信息的錯誤恢復。CBR業務,屬於實時性業務,要求提供嚴格的端到端定時同步功能。由於ATM網路採用了統計復用的策略實現多路業務的復用,信元在經過復用及交換後,將以不同的時延到達接收端,也就無法保證其原有的恆定速率,破壞了其周期性。恢復CBR業務的源定時,是ATM網路支持CBR業務所要求具備的基本功能。
CBR業務可以直接來自用戶終端設備,還可能來自傳統的電路交換網,如公用電話網、數據網及各種專用網。CBR業務的時鐘可分為同步時鐘和異步時鐘。同步時鐘是指CBR業務的時鐘與網路時鐘同步,在這種情況下,AALl管理實體直接從網路向AALl接收實體提供時鐘,不需要進行時鐘恢復。AALl-SDU數據以網路提供的時鐘從接收端FIFO緩衝區中讀出。如果在傳送端和接收端的業務時鐘存在長期的系統誤差,那么在AALl接收端或下游的終端設備中將發生周期性的緩衝區上溢或下溢。因此,這種由網路提供時鐘定時的性能將與網路同步的精度範圍有關。
如果業務時鐘與網路時鐘是異步的,則需在接收端進行源定時恢復。由於ATM信元到達的不確定性,使得定時恢復變得相當複雜。其遵循的基本原則是以信元的到達時刻及到達間隔時間等信息為依據,並儘量藉助其它的輔助同步信息。
ITU-T I.363建議中提出兩種支持異步CBR業務的方法,一種是自適應時鐘法(Adaptive Clock Method),一種是同步剩餘時標法(Synchronous Residual Time Stamp,SRTS),對於滿足ITU-T G.823/G.824中關於抖動和漂移要求的業務,建議採用SRTS法;在專用網中沒有嚴格的漂移限制時,可以使用自適應時鐘法。
自適應時鐘法(ACM)
自適應時鐘法不需要在網路中傳送額外的定時信息,其基本原理在於固定時間內傳送的信元數目反映了傳送源的時鐘頻率,此信息在接收端被用來恢復源時鐘頻率。通過在一定時間周期內對接收數據量的平均‘,CDV效應將被消除。用來進行定時均化的時間周期決定於CDV的特性。
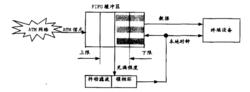 圖3
圖3自適應時鐘法的具體實現是多種的,圖3顯示了一種通過使用AAL用戶數據緩衝器的填滿程度進行自適應時鐘恢復的方法。
圖3接收端將接收的ATM信元寫入一個緩衝器,並由一個本地產生的時鐘控制其讀出頻率。緩衝區的填滿程式將取決於源時鐘頻率,並用來控制本地時鐘頻率,使兩者趨於一致。具體操作是不斷地測量緩衝器的充滿程度,其測量結果用於驅動鎖相環產生本地時鐘。這種方法主要是要使得緩衝器的填充程式儘量保持在中間位置,為了防止緩衝器的溢出,設定上限和下限兩個門限。當超出上限時,說明本地時鐘頻率比源時鐘頻率要低,需要將其頻率提高,否則,將導致緩衝器的上溢。相反,當充滿程式低於下限時,說明本地時鐘的頻率要比源時鐘頻率高,為防止緩衝器的下溢需將其頻率降低。
同步剩餘時標法(SRTS)
 圖4
圖4同步剩餘時標法是同步定時恢複方法的一種。同步定時恢復技術的基本概念是利用了公共參考時鐘,ATM網路中信元是統計復用的,因此在ATM層中信元的傳送是異步的;但它基於SDH傳輸網路的物理層仍然為一全網同步的同步網,可以由它為收發兩端提供公共的網路參考時鐘。圖4顯示了同步定時恢復的基本原理。傳送端將其業務時鐘fs與網路參考時鐘fnx相比較,將得出的頻差/相差信息通過ATM信元傳送至接收端,接收端利用此信息及fnx恢復出傳送源時鐘。
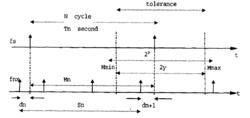 圖5
圖5最初的同步時鐘恢複方法為美國Richard C.Lan等人提出的SFET(Synchronous Frequency Encoding Technique)方案,後來法國人Julio Gonzales提出了採用公共網路參考時鐘TS(Time Stamp)方案。1991年12月,CCITT將此兩種方案結合起來,綜合了SFET及Ts方案的各自優點,提出了ITU—T標準的SRTS方案。SRTS技術的原理如圖5所示,圖中使用的各符號含義為:
fn:網路參考時鐘頻率,例如19.44MHz
fnx:網路分頻時鐘頻率,fnx=fn/x,X為整數
fs:業務時鐘頻率
N:RTS的周期(以fs的時鐘周期為單位)
Tn:RTS的第n個周期(單位為s)
£:時鐘頻率的容差範圍(單位為PPm)
Mn(Mnom,Mmax,Mmin):第n個RTS周期中包含fnx時鐘的周期數,一般為非整數。Mnom、Mmim和Mmax分別代表其標稱值、最小值和最大值。Mmin、Mmax相對Monm的最大偏移量為y。
從由圖5可見,在第n個業務時鐘周期Tn內,包含有Mn個經分頻的網路時鐘(頻率為fnx),fs有一個允許偏差,使得Tn與Mn的值隨時間變化。如果將№的信息傳送至接收端,即可由終點根據fnx、Mn及共同約定的N值,恢復出源業務時鐘fs。由於Mn一般不是整數,而同步定時恢復技術中只能傳送整數值,因此,需對Mn的小數部分進行處理。在此採用了一個P比特異步計數器對fnx時鐘進行計數。由於下一次脈衝未到達前,計數器不會更新,從而完成取整工作。這樣還可以保持Mn小數部分的積累效應,而不是簡單的四捨五入的取整方法。在圖5中,dn代表前一個(即第N-1個)觀察周期中Mn值的小數部分,sn為第n個周期的Mn值加上dn後的取整值,即:
Sn=[Mn+dn]
且dn+1=dn+Mn-Sn,式中[·]表示取整運算。
對於精度較高的業務時鐘fs而言,Mn只在有限的範圍內變化,其最大偏移量Mmax-Mmin=2y<<Mnom。Sn的變化量也比其本身值小得多,由上式可得[Mmin+dn】≤Sn<[Mmax+dn]
由於dn的最大值及最小值分別為1和0,可得到sn的上下界為:
[Mmin]≤Sn≤[Mmax]+1
由此式可以看出,sn的多數高位比特沒有攜帶任何信息,只要少數低位比特需要傳到接收端,就可完成對源時鐘的恢復,這些低位比特信息即被稱為剩餘時標。
ITU—T I.363中規定了SRTS法的幾個主要參數:
N=3008(即8個SAR-PDU淨荷的總比特數,每個淨荷為47個位元組)
1<fnx/fs<2
fs允許偏差£=200×10^-6
P=4比特
M的最大偏差範圍y=N×fnx/fs×£
如果ATM網路採用SDH傳輸網路作為物理層,將其一級時鐘的並行處理時鐘作為網路時鐘,即
fn=155.52÷8=19.44MHz
fnx=fn×2^-k
對於E1 2.048Mbit/S業務取K=3,使
fnx/fs=2.43/2.048=1.187
可得:y=3008×2.43/2.048×200×10^-6=0.714
可見M的偏差小於1個fnx周期,用4個比特來表示此種業務時鐘的最大偏移量(2y)是足夠的。I.363建議將這4比特RTS放在SAR-PDU標頭的CSI比特位傳送,具體講是序號為奇數的SAR-PDU標頭的CSI比特位.我們利用4比特計數器來產生RTS,Mnom的確切值為:
Mnom=fnx/fs×3008=3569.0625=1.0625(mod 16)
那么,依上例可以列出一個典型的RTS輸出序列如下:…,……,12,13,15,1,2,3…12,13,15,1…
RTS的變化量必須為整數,且其變化量的均值為Mnom mod29。在上例中,RTS的變化量為1或2,並且變化量為2的事件只能每16個RTS周期發生1次,其平均間隔時間為I/0.0625=16個RTS周期。RTS的這種遞增型變化趨勢反映了計數器對M中小數部分的積累。一般地,連續的RTS之間存在著下面的關係:
RTSn+1=RTSn+Sn(mod 2^p)
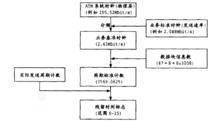 圖6
圖6RTS計算方法如圖6所示,其中方框中數據為上述計算實例。圖6給出了SRTS方法進行的時鐘同步過程,網路數據首先送入FIFO緩衝區,緩衝區數據送往終端是由鎖相環PLL(Phase LockLoop)規定的本地時鐘控制,接收端根據網路數據中存放的時間標記重建本地時鐘。由於網路延時抖動,會出現網路數據中時間標記到達的抖動,可能會引起PLL時鐘晃動,所以可以使用抖動濾波器濾出抖動噪聲。
