
類型
壓電馬達一般分為交流壓電馬達和直流壓電馬達。運動方式分為旋轉和直線運動兩種。壓電馬達由振動件和運動件兩部分組成,沒有繞組、磁體及絕緣結構。功率密度比普通馬達高得多,但輸出功率受限制,宜製成輕、薄、短小形式。它的輸出多為低速大推力(或力矩),可實現直接驅動負載。這種電機因內部不存在磁場,機械振動頻率在可聽範圍外,因此對外界的電磁干擾和噪聲影響很小。壓電馬達易於大批量生產。
結構和工作原理
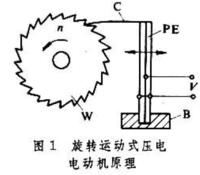 圖1
圖1壓電馬達的結構形式很多,但多數的動作原理相同,都是利用壓電體在電壓作用下發生振動,驅動運動件旋轉或直線運動。
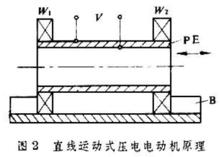 圖2
圖2圖1中,壓電體PE的一端固定於基座B,PE在電壓V作用下產生振動,通過爪桿C使棘輪W旋轉,獲得旋轉運動。圖2中,薄壁圓筒狀壓電體PE的內外壁間加以電壓V 時,就產生軸向伸縮運動。PE的兩端各有一個電磁線圈W和W。W通電時,產生的電磁力使PE一端固定於滑槽底座B上,另一端則隨PE的伸縮在B的滑槽內位移。W2通電時,PE的固定端及位移端反之。只要W和W的通斷間隔與PE的伸縮頻率相適應,PE就可在B的滑槽內作單方向的位移,獲得直線運動。
由於一般壓電體的能量轉換效率較低,且振動或伸縮的幅值很小,因而只能製成特殊要求的專用馬達,獲得微小變位的蠕動。
超音波壓電馬達
簡介
1981年,日本指田年生研製成超音波壓電電動機,即超音波壓電馬達(簡稱超音波電動機),克服了傳統壓電電動機轉換效率低和變位微小的缺陷,壓電電動機開始進入工業實用階段,如外徑50毫米,輸入電壓100伏,頻率40千赫,輸出功率可達4瓦的超音波電動機。
分類
超音波電動機有駐波式和行波式兩種。駐波式超音波電動機的條狀壓電體具有交替排列的極化區,施加直流電壓時產生伸縮交替的變形,收縮部分凸起,伸長部分下凹,整條呈波狀。電壓極性相反,變形方向隨之改變。如施加交流電壓,壓電體就隨時間作振動變形。此變形是一系列以極化界面為過零點的脈振波,即駐波振動。行波式超音波電動機由兩條相同的壓電體相互錯開半個極化區長度粘合成一體而成,當分別施加時間上相差90°電角度的交流電壓時,兩壓電體就分別作駐波振動,由彈性體接受的合成振動波是一個隨時間前進的行波,即作行波振動。駐波形式的能量轉換效率較高,但需特殊的推力或力矩耦合部件,體積較大,且只能作單向運動,控制性能差,因而人們更重視行波方式的超音波電動機。
原理
將條狀壓電體製成圓板或圓環,即可製成旋轉運動的超音波電動機。當彈性體接收壓電體的行波振動後,通過轉子上的摩擦件,利用摩擦力使轉子旋轉 。
一般超音波電動機要由20~200千赫的專用高頻電源供電。電源需具有克服因溫度變化而致頻率漂移的自動頻率調節功能和為保證二相交流電壓時間相位相差90°電角度的鑒相及反饋控制環節。超音波電動機的轉速與電源頻率無關,轉速-力矩特性的起始部分為略呈下垂的直線,因而既可作為精密驅動機構的驅動元件,也可在速度和位置伺服系統中作為執行元件。
特點及套用
與傳統電磁式電動機比較,壓電超聲馬達有以下特點:1.結構簡單,它的基本構成是振動部件和運動部件;2.單位體積轉矩大,是相同體積的傳統電動機的10倍;3.低速性能好,可以將轉速調節到零,能在低速直接輸出大轉矩;4.制動轉矩大,不需要附加制動器;斷電可自鎖等特了;5.機械時間常數小,回響快,控制精度高;6.沒有磁場和電場,無電磁干擾和電磁噪聲等 。
壓電諧波馬達
工作原理
壓電諧波馬達是根據諧波傳動原理和壓電逆效應原理,由kn組(n為波數,等於2或3;n= 2時,k=4,6,8,10等偶數,當n= 3時,k= 2,4等偶數)壓電驅動器連線彈性鉸鏈位移放大機構,沿柔輪圓周方向均勻分布,而構成壓電式波發生器。通過控制器控制驅動各組壓電驅動器,使各組壓電驅動器彼此按一定的相差進行周期性伸縮變形,再經過位移放大器進行位移放大,使柔輪產生周期性的變形,如果是剛輪固定,通過柔輪和剛輪的嚙合,便可使柔輪產生旋轉 。
特點
壓電諧波電機將壓電陶瓷驅動器和諧波傳動裝置結合在了一起,因此具有以下特點:(1)轉速低,諧波傳動裝置作為減速器使用時,傳動比較大,一般為50-300,而壓電諧波電機通過控制壓電波發生器的變形頻率,便可獲得很低的轉速。(2)質量小,因為壓電諧波馬達為低速電機,僅柔輪緩慢旋轉,且其質量較小。(3)回響快,壓電驅動器的回響速度可達幾微秒,而柔輪的慣量又較小,所以馬達的回響速度很局。(4)運動精度高,因為柔輪和剛輪的嚙合齒數可達30%,甚至更多。(5)控制性能好,容易同計算機進行接口,實現智慧型化,不需外加編碼器等檢測裝置,通過微機及單片機進行程式控制各組壓電驅動器的變形,很容易實現調速、換向、步數計算等多種功能。(6)效率高,由於運動部件數量少,而且柔輪和剛輪嚙合齒面的速度很低,因此效率很高。(7)運動平穩,無衝擊,無噪聲。(8)不產生磁場,同時也不受磁場影響。基於壓電諧波馬達的以上特點,壓電諧波馬達在工業控制系統、超高精度儀器儀表、半導體製造設備、辦公自動化設備、機器人、精密機械、航空航天等領域中將有著廣闊的套用前景 。
工業發展對電機的要求
低速
傳統電機都是以高速旋轉的,一般為:2800,1400,960,720r/min四種轉速,這種轉速很難滿足各種工業設備運行的需要,90%的電機必須與龐大的減速機構配套使用。在伺服系統中,電機採用齒輪傳動後,不僅使系統尺寸、重量增加,而且造成噪聲、增加慣量及降低效率。同時,由於齒輪嚙合精度的限制,在要求正反轉和平穩快速反應時,齒輪轉動往往影響系統性能。所以,低速電機的開發勢在必行 。
微小型化
微電機是自主運動的微系統核心元件,是微機械研究的重要內容之一。目前,微電機研究一方面是最佳化現有微電機的結構,以提高輸出特性,另一方面是探索新結構的微電機。微電機的研究已在靜電微電機、電磁微電機和壓電微電機三個方向,取得了一定進展。其中,靜電微電機採用的是靜電力驅動的。靜電力屬表面作用力,隨尺寸減小其作用相對增強,但是,電機中的摩擦力和粘滯力也較強,因而,靜電電機力矩較小,難以套用。電磁微電機採用傳統電磁驅動方式,利用精密機械加工或IC工藝,實現小型化,已在毫米級微電機研製中取得較大進展。但由於y寸效應”影響,進一步微型化面臨困難。壓電微電機採用摩擦力為驅動力,尺寸效應的負面影響較小,可能成為有前途的微機械動力源。
高精度
產業機械機構傳動及加工主要來自於馬達的機械性能,同時其定位功能也直接關係機械運動的精確度,因此優良的馬達定位技術是許多工業控制器的必備條件。由於控制馬達常見的種類有步進馬達、交流伺服馬達及直流伺服馬達,其中伺服馬達的定位功能是產業機械向自動化發展的重要基本因素。近年來積體電路、電子製造業蓬勃發展,對高速而精準的馬達點對點運動有迫切的需求 。
