
地下鐵道行車自動化系統
沿革 捷運行車自動化系統是隨電子技術的發展於20世紀 60年代開始出現的。蘇聯於 1958年首次研製成功了較低級的行車自動化系統,1962年在莫斯科捷運試用。美國於1960年在紐約捷運試運行列車自動運行系統(ATO),其設備方框圖見圖1。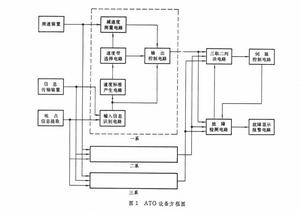 70年代以來,各國捷運都向著綜合自動化方向發展。美國於1972年 9月在舊金山海灣採用城郊快速運輸系統(BART)。這個系統的控制中心安裝了兩台計算機(其中1台備用),能同時指揮和控制105列列車執行計畫運行圖。1971年7月23日英國在維克多利亞線上實現行車自動化,開通線路全長22.4公里。1972年法國在巴黎捷運東西快車線上實行自動調度,利用列車自動操縱設備實現了自動駕駛,較全面地實現了列車行車指揮和列車運行自動化。
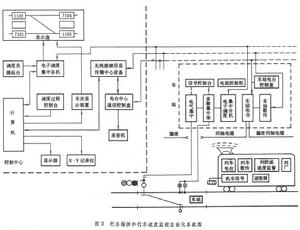
70年代以來,各國捷運都向著綜合自動化方向發展。美國於1972年 9月在舊金山海灣採用城郊快速運輸系統(BART)。這個系統的控制中心安裝了兩台計算機(其中1台備用),能同時指揮和控制105列列車執行計畫運行圖。1971年7月23日英國在維克多利亞線上實現行車自動化,開通線路全長22.4公里。1972年法國在巴黎捷運東西快車線上實行自動調度,利用列車自動操縱設備實現了自動駕駛,較全面地實現了列車行車指揮和列車運行自動化。 中國北京捷運採用了調度集中控制、移頻制自動閉塞和自動停車等基本信號設備。1975年開始試用自己研製的行車自動化系統。1976年開始採用國產電子計算機,初步實現了鐵路行車指揮自動化。北京捷運環線實現了行車指揮和行車速度監控的自動化(圖2)。
 地下鐵道行車自動化系統
地下鐵道行車自動化系統系統構成 地下鐵道條件較地面鐵道為優越,但運送的全是旅客,所以對行車自動化系統的安全性、可靠性要求較高。系統構成中最基本的是人工控制信號設備,疊加自動控制信號設備,再疊加行車的全自動控制系統。這樣在高級系統失靈時,低級系統能運轉。此外,在全自動化控制系統中都增加安全可靠措施,例如在套用計算機時儘可能增加多機冗餘系統。
在捷運行車自動化系統中,控制中心和列車間的信道方式較多,一般採用的有軌道電路傳輸,軌道程式電纜,漏泄電纜等。
發展趨勢 70年代之後興建的捷運,都按綜合自動化系統設計,即除行車指揮自動化和列車運行自動化之外還包含電力管理、後勤業務、衛生管理、售票檢票、車輛檢修、水位控制、通風控制以及車輛段調車作業等自動化系統,加強管理質量。
隨著微型計算機的飛快發展,多微型計算機網路系統將廣泛套用於捷運行車自動化系統。多微型計算機聯網可設計成一個完整的後備冗餘系統,其功能分散,危險分散,系統的可靠性提高。
