
簡介
兩自由度直驅電機具有直接驅動的特點,即不需要中間傳動機構即直接驅動負載作直線、旋轉或螺旋運動,大大減小設備體積,顯著提高效率。兩自由度直驅電機在需要複雜運動的動力系統如數控工具機、機器人、雕刻機、汽車生產線、攪拌機、球形閥等設備中,具有非常廣闊的套用前景,受到學術界和工業界的廣泛關注。目前典型的兩自由度直驅電機大都屬於感應電機、永磁電機或磁阻電機類型。設計理論採用“場化路”的解析法或有限元法,建立數學模型以及求解電磁場方程分析。 通過參考國內外最新 ,分析了兩自由度直驅電機的設計理論、控制方法和套用技術等方而的研究現狀及發展概況,針對現有兩自由度電機技術,介紹了一種新型的兩自由度直驅感應電機(2-DOF DAIM)拓撲結構,闡述其工作原理及優點,討論了未來兩自由度直驅電機的發展方向 。
兩自由度直驅電機是一種無中間傳動機構的新型電機,這種電機可以分別做直線運動、旋轉運動以及兩者合成的螺旋運動。它具有機械集成度高,電機結構材料和驅動控制系統元件利用率高等優點,是典型的機電一體化產品。目前兩自由度的驅動技術多採用兩個或多個旋轉電機以及中間傳動裝置來實現。但是由於中間機構的存在,使得系統控制方式複雜,系統體積大零部件多維護量大、價格昂貴,而且中間傳動裝置需要承受較大的軸向力,易出現磨損嚴重使系統可靠性降低的問題。在兩自由度機械系統中,採用一台兩自由度電機來代替兩個或多個旋轉電機及傳動裝置,可以大大簡化機械系統的結構,減小體積及重量,從而提高系統的精度和動靜態性能。因此兩自由度直驅電機可廣泛用於數控工具機、機器人、攝像操作台、雕刻機、汽車生產線、攪拌機、球形閥等設備上,具有廣泛的套用前景。
一種直驅的機電驅動系統被套用於具有 AMT和DCT的汽車變速裝置以更利於齒輪切換;將一種旋轉一直線驅動器用於雙功能輪驅裝置;介紹了交流伺服電機和直線感應伺服電機在混合質量阻尼器中的套用;提出了一種旋轉一直線及直線一旋轉運動轉換器;多自由度機器人在摩天大樓護牆上的套用;在機器人領域,使用柔順連線可以顯著提高系統性能。以上都是多自由度驅動裝置的典型套用。
兩自由度電機電磁設計、拓撲結構探索及其機理分析、磁場分析、有限元建模及特性分析、運動控制等一系列新問題都會形成新的研究方向,進一步拓展電機學科的研究範圍,因此兩自由度電機的研究既具有實際意義,又還具有很高的理論意義,已成為電機學科發展的新前沿。
國內外研究現狀
20世紀50年代初,為了改善感應電機的調速哇能,英國的威廉士等人研製出了一種變速球形感應電機,這種電機的定轉子都可以動,是有記載的最早的多自由度電機。早期由於電機理論的不完善,再加上機械製造水平的限制,多自由電機遇到很多難題,可靠性差尤甚。直到20世紀70, 80年代載人航天、機器人等技術的發展直接激發了多自由度電機的發展,特別是以新材料微電子技術為代表的第三次科學技術革命的開展,為多自由度電機的結構設計製造和電機驅動控制系統的實現提供了有利的條件。作為一種匯聚電機本體結構、電源驅動的典型機電一體化產品,各國研究人員對多自由度電機的開發和研製方興未艾。目前的兩自由度直驅電機按原理可分為感應電機、永磁電機與磁阻電機。
國外研究現狀
1感應電機
螺旋運動感應電機是兩自由度的最常見的電機,它能夠產生純的直線運動、旋轉運動以及螺旋運動。螺旋電機,定子採用螺旋形三相繞組嵌入由六個軸向疊片組構成的定子鐵心的斜槽中,動子採用各向同性的圓柱體的拓撲結構,也就是在鐵磁軸上套上一定厚度的銅套筒。當三相螺旋定子繞組通電後將產生螺旋形磁場,由於感應電機的原理,動子將同時在軸向和周向受到力作用。採用場論的分析方法對電機模型進行分析,首先建立其氣隙和次級邊界的場坐標,然後對磁矢位進行求解 。
2永磁電機
永磁同步旋轉直線電機,這種電機由一對相同的圓筒形定子沿相同的軸心端對端對齊,同樣也是筒形的轉子沿同一軸心置於轉子的內部,定子部分同轉子一起置於一個通過適當旋轉直線軸承支撐的機械結構中。定子部分包括鐵心和線圈,鐵心在巨觀上是各向同性並且具有半封閉的槽。轉子包括鐵心和2p個永磁體(永磁體的個數等於定子繞組的極數),永磁體是凹形圓柱狀扇形體,並在軸向方向具有統一的磁場強度。永磁體對稱地貼到鐵心上而。永磁體的有效長度等於定子鐵心的有效長度加上定子間距。
圓柱狀Halbacb陣列結構的永磁旋轉直線電機,它的設計思路是為了獲得軸向的推力和切向的旋轉轉矩,需要在不同方向上建立兩種氣隙磁場。因此它採用了空心的動子結構,在空心動子的內壁和外壁均設定定子,外部的各向同性三相定子產生轉矩,內部裝載有兩個環形線圈的定子用來產生軸向力。動子由圓筒形鐵心和貼上在鐵心內外的Hallbach永磁陣列組成,在鐵心外側的永磁體和一般的無刷式電機相似,而鐵心內部的永磁體則和音圈電機類似。
3磁阻電機
磁阻電機定子開槽為螺旋形,可以做旋轉運動。定子繞組供電電流由低頻和高頻電流疊加生成,低頻電流通過繞組主要產生軸向磁阻推力,而高頻電流由於感應原理產生轉矩。眾所周知,電流頻率越高,鐵心的渦流損耗越大,因此它的缺點是產生較大渦流,而且控制轉矩推力較為困難。
國內研究現狀
我國對多自由度電動機的研究始於20世紀80年代後期,起步雖然較晚,但國家有關部門非常重視,863計畫和國家自然科學基金都資助過多自由度電動機方而的研究。西北工業大學、華中理工大學、哈爾濱工業大學和浙江大學等高校在認真總結國外研究成果的基礎上,研製出了各自的多自由度電動機樣機,並對有關問題進行了較為深入的研究。
 兩自由度直驅電機
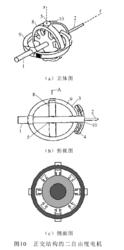
兩自由度直驅電機浙江大學研製出了一種正交結構的二自由度電機,這種電機由兩個步進電機組成,其原理如圖10所示。軸1定為擠由方向,軸5定為x軸方向。內層電機繞由旋轉,外層電機繞x軸擺動,兩電機軸在空間上相互垂直,從而實現兩自由度運動。圖1中1為固定軸,2是輸出軸,電機的工作是由兩套獨立的極組來共同完成的。如圖10所見,依靠固定永磁極3與可移動電磁鐵4,外層電機軸2可發生以5為軸心的左右偏移,所以輸出軸可以繞x軸擺動。由圖10可見,當軸1為固定時,電磁極6也是不動的,則將使原來裝有永磁極7的圓環8轉動,即內層電機實現繞擠由的旋轉運動。8與9以及框架10. 5都是固定在一起的。這樣,便可使輸出軸2繞z}由方向旋轉,再加上對x軸的偏移,就可以使輸出軸在空間上實現二自由度的運動。
哈爾濱工業大學在國家863計畫資助下研製出了正交圓柱體結構二自由度電動機樣機。該電機由定子、可動子、轉子、一對x向軸承、一對x向端蓋、一對:向軸承、一對z向端蓋組成。電機的定子由矽鋼片疊壓製成,內側圓周上均勻布置一些齒和槽,槽內設定兩相定子勵磁繞組。電機的轉子由輸出軸和兩段鐵心組成,兩段鐵心上分別均勻布置若干小齒,兩段鐵心相互錯開1/2齒距。電機的可動子由永磁體及其兩側的兩段鐵心組成,永磁體採用高矯頑力、高磁能積、易於加工的欽鐵硼材料,Z由方向充磁。由於永磁體的作用,可動子外側4個齒呈N. S. S. N規律分布。可動子內側沿圓周分布4對極,每個極上有若干小齒,極間槽內設定兩相勵磁繞組。轉子鐵心和可動子鐵心與定子鐵心一樣均由矽鋼片疊壓製成 。
以上學者開展了相關研究工作,所提出的拓撲結構存在以下特點:
1)直線一旋轉兩自由度運動驅動源最簡單拓撲結構採用旋轉電機與圓筒直線電機沿軸向串聯布置,其整體結構軸向長、轉動慣量大、需要機械聯接部件多、維修不便。
2)定子採用螺旋繞組,鼠籠條採用螺旋狀,電機轉子做螺旋運動,定子開螺旋齒槽、繞組採用螺旋布置、轉子導條採用螺旋狀,存在加工量大,機械工藝要求苛刻。
3)採用內外定子的永磁電機或感應電機,外定子產生旋轉磁場,內定子產生行波磁場,電磁場空間耦合,電機結構複雜,加工裝配工藝要求嚴格。
4)採用空間正交雙繞組的異步或永磁同步電機繞線困難、電磁場空間耦合、加工量大。
5)採用永磁體特殊布置結構,以使電機產生螺旋運動的同步機存在磁場空間耦合,永磁體的空間布置要求嚴格。
6)直線一旋轉磁阻電機效率低,功率因數低,轉矩脈動難以克服。
從目前多自由度電機的研究情況上看,無論是兩自由度或者三自由度電機雖然提出的結構樣式比較多,但由於理論還不夠完善,大都處於實驗室試驗階段,距離真正工業或者是商用還具有較大差距。對新型兩自由度電機結構樣式的開發和對已有電機進行最佳化和改進依然是各國研究者的艱巨任務。
控制方法
兩自由度電機的電磁耦合是指電機定子繞組同時參與輸出軸兩個自由度的運動的形成。兩自由度的運動耦合是指兩個自由度的運動相互之間不獨立,電機輸出軸一個自由度的運動狀態改變對另一個自由度的運動狀態產生改變。
兩自由度電機按照電磁與運動的耦合關係分為以下四類:既有電磁耦合又有運動耦合、存在電磁耦合不存在運動耦合、存在運動耦合不存在電磁耦合與電磁耦合與運動耦合都不存在。兩自由度電機耦合關係分類的不同,它們的控制方法也不盡相同。四種類型兩自由度電機的控制方法分析如下 。
既存在電磁藕合又存在運動藕合的兩自由度電機控制策略分析
這一類兩自由度電機由於存在電磁耦合和運動耦合的問題,需要對電磁關係和運動關係進行解禍。對其控制一般分一下幾個步驟:首先要對兩自由度電機的電磁關係進行解禍,將其等效成兩個單自由度電機數學模型;然後建立在D-H坐標系(桿坐標系)下的運動學模型,通過推導兩自由度電機的速度雅可比矩陣和偽矩陣,建立了電機輸出軸在直角坐標空間的廣義速度與各自由度轉角和角速度之間的關係;通過建立了直角坐標中描述的廣義速度與各自由度轉角的角速度之間的關係,實現對兩自由度電機有速度要求的軌跡控制。
存在電磁藕合不存在運動藕合的兩自由度電機控制策略分析
存在電磁耦合不存在運動耦合的兩自由度電機省去了對運動耦合的解禍過程。兩自由度電機需要先對兩個自由度的電磁關係進行解禍將其等效成兩個單自由度電機,實現對兩個單自由度的速度或者角度的直接控制,然後通過對兩個單自由度的運動量進行協調,從而獲得所需要的電機運動軌跡。由於客觀上的電磁耦合,雖然可以等效把電磁關係解禍,但最終兩自由度電機的單自由度運動量之間存在固有的聯繫。
不存在電磁藕合但存在運動藕合的兩自由度電機控制策略分析
這一類兩自由度電機不存在電磁耦合,因此不需要對電磁關係進行解禍,因此從本體上看兩自由度電機可以看成兩個單自由度電機的集成。它能實現對兩個單自由度的運動量比如角度速度的直接控制。由於存在運動耦合,所以需要建立其在D-H坐標系(桿坐標系)下的運動學方程,需要推導其速度雅可比矩陣和偽矩陣,來建立了電機輸出軸在直角坐標空間的廣義速度與各自由度轉角和角速度之間的關係。這類兩自由度電機通過建立直接獨立控制兩個自由度的速度或角度與輸出軸廣義的速度直接的關係可以實現有速度要求的軌跡控制。
既不存在電磁藕合也不存在運動藕合的兩自由度電機控制策略分析
這一類兩自由度電機不存在電磁耦合和運動耦合,其在電磁關係和控制上都能等效成成兩個各單自由度電機。直接建立兩單自由度電機的數學模型和在直角坐標系下的運動狀態方程,根據輸出軸運動的要求對運動進行合成或者分解,通過對兩個單自由度電機的協調控制來實現兩自由度電機輸出構想的運動軌跡。由於兩個運動自由度的形成相對獨立,可以將普通單自由度電機的控制策略套用到兩自由度電機控制中,比如矢量控制、智慧型控制等。由於對各個自由度的速度都能進行獨立控制,因此這一類兩自由度電機的控制性能更好,能實現高精度的速度和軌跡控制。
兩自由度電機研究的方向
由於兩自由度電機是將兩種不同運動形式和兩套運動產生源集成到一套系統中,因此兩自由度電機和通常單自由度電機相比有許多不同的特徵,因此可以預見以下這些方而將成為兩自由度電機發展的研究熱點。
1)就是開發新結構新原理的兩自由度電機。由於工業套用方而的拓展,使用環境和套用要求不斷變化,現有的兩自由度電機結構可能不能滿足要求,因此需要根據環境性能需要,繼續研發具有新結構和新原理的兩自由度電機 。
2)就是要對已有的電機模型進行結構的最佳化。和傳統電機一樣,對兩自由度電動機的結構進行最佳化,可以使電機結構簡單,便於製造,提高電機的機械集成度及材料的利用率,擴大動子的偏轉範圍,簡化支撐結構,減輕重量,減小體積。另外,還可以通過結構最佳化來簡化各自由度之間的電磁及力學耦合關係,提高系統的性能和穩定性。
3)兩自由度電機電磁場的計算問題。電磁場的計算問題是兩自由度電機控制的理論基礎。由於兩自由度電機結構的特殊性,其磁場具有邊界條件複雜、各向異性、非線性、端部效應的問題,而且兩自由度電機的電磁場大都是典型的三維場,很難使用二維場來進行簡化,因此兩自由度電機電磁場的分析計算問題是此種電機設計的難點和重點部分。
4)耦合問題。由於兩自由度電機是將兩種不同的電機系統融合到一個系統中,因此其電磁和運動都有耦合的可能。如何定量地分析這些耦合關係及其對電機性能的影響,以及如何消除這些不良影響,是多自由度電動機研究中待解決的關鍵問題。
5)電機的運動控制問題。由於多自由度電動機自身的特點,各自由度之間除了存在電磁耦合之外還存在著十分複雜的力學耦合關係,這是多自由度電動機難以控制的重要原因之一,因此必須根據電機的具體結構,建立準確的力學模型,深入分析各自由度之間的耦合關係,研究力學解禍控制策略,以提高電機的動靜態性能及穩定性。因此需要根據電機的實際結構建立其運動學模型,確立其輸出軸的運動軌跡控制策略。
6)驅動控制系統的研究。多自由度電動機是典型的機電一體化產品,其驅動控制系統不僅要對各自由度的角位移、速度、加速度及輸出轉矩進行檢測,還要進行各自由度之間的解禍計算、軌跡規劃,因此有必要研製適合於多自由度電動機控制系統的專用控制元器件並開發計算機控制系統。
由於看到了兩自由度電機的優越性,各國研究人員加大了對多自由度電機的研究力度。隨著多自由電機理論的不斷完善,制約多自由電機發展的以上技術瓶頸正不斷被打破。可以預見,在不久的將來,兩自由度電機一定能夠得到廣泛套用。
展望
兩自由度直驅電機可以代替兩個或更多用於產生複雜運動的旋轉電機及與其連線的繁瑣而又效率低下的傳動機構,可以有效節省空間,提高效率。 分析了兩自由度電機電磁設計、拓撲結構探索及其機理分析、磁場分析計算、有限元建模及特性分析、運動控制等一系列問題的研究現狀及發展概況。針對現有兩自由度電機技術,介紹了新型的兩自由度直驅感應電機(2-DOF DAIM)拓撲結構,闡述其工作原理及優點,討論了未來兩自由度直驅電機的發展方向。兩自由度電機的研究不僅具有實際意義,而且還具有很高的理論意義,已成為電機學科的發展前沿。但是,該類電機研究還處於初級階段,開發和製造新型電機的技術仍有待提高 。
