
全驅動系統指的是系統輸入數量等於被控自由度數量的一類機械系統,需要注意的是被控制自由度 數量而非系統狀態數量。與之對應的兩類系統為欠驅動系統與過驅動系統。對於一個給定的機械系統,其驅動情況是有具體的執行結構的配置情況決定的。
定義
牛頓形式下的描述
牛頓運動定理揭示了機械系統的動力學為二階系統。通常,這些動力學可以用如下的二階微分方程進行描述:
 全驅動系統
全驅動系統其中,
 全驅動系統
全驅動系統是位置狀態向量,
 全驅動系統
全驅動系統是輸入狀態向量,
t是時間。
進一步地,在很多機械系統中,狀態方程都可以表示成如下輸入仿射的動力學
 全驅動系統
全驅動系統對於具有該種仿射動力學的機械系統,如滿足如下的維數條件
 全驅動系統
全驅動系統則該系統稱之為全驅動系統。
連線埠哈密頓的描述
機械系統通常均具有無源的特點,絕大多數均可以連線埠哈密頓(port-Hamiltonian)進行描述。基本形式如下:
 全驅動系統 全驅動系統
全驅動系統 全驅動系統 全驅動系統 全驅動系統
全驅動系統 全驅動系統其中是廣義位置,是廣義動量,u是控制輸入,H為該系統的Hamiltonian函式,其定義如下
 全驅動系統
全驅動系統若
 全驅動系統
全驅動系統則稱該機械系統為全驅動系統。
在該模型中,輸入u能夠影響輸入矩陣G(x)的像空間Im(G(x)),在全驅動情況即可通過求解代數方程對系統進行更為靈活的成型(shaping);而欠驅動情況成型過程需要求解偏微分方程,該情況更為複雜。
物理系統舉例
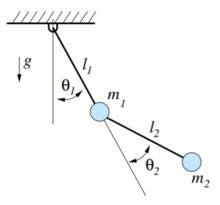
簡單機械臂
考慮下圖中簡單的機械臂,其動力學是標準的操縱方程(manipulator equations):
 全驅動系統
全驅動系統H(q)q¨ + C(q, q˙)q˙ + G(q) = B(q)u
眾所周知,慣性矩陣H(q)總是一致對稱和正定的,因此可逆。這樣我們可以得到
q¨ =H−1(q) [C(q, q˙)q˙ + G(q)] + H−1(q)B(q)u.
 全驅動系統
全驅動系統由於一直滿秩,我們可以發現該機械系統是全驅動的,若且唯若B(q)是行滿秩的。例如如下情形系統全驅動,
q = [θ1, θ2] T and u = [τ1, τ2] T , and B(q) = I2×2.
一些動力定位系統
動力定位系統(Dynamic Positioning System)是一種閉環的控制系統,其採用推力器來提供抵抗風、浪、流等作用在船上的環境力,從而使船儘可能地保持在海平面上要求的位置上,其定位成本不會隨著水深增加而增加,並且操作也比較方便。動力定位系統首先在海洋鑽井船、平台支持船、潛水器支持船、管道和電纜敷設船、科學考察船、深海救生船等方面得到套用,其主要原理是利用計算機對採集來的環境參數(風、浪、流),根據位置參照系統提供的位置,自動地進行計算,控制各推力器的推力大小,使船舶保持艏向和船位的“紋絲不動”。
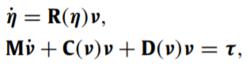
在一些特定情況下,動力定位系統為全驅動。動力學如下,
 全驅動系統
全驅動系統其中η是廣義位置向量,ν是船體坐標系下的速度向量,τ表示總的力和力矩,M為總的廣義質量矩陣,C(ν)為Coriollis矩陣,D(ν)是總的水動力阻尼矩陣,函式R(η)是旋轉矩陣。如上表示形式可視為全驅動系統,其亦可轉換為連線埠哈密頓形式,如下
 全驅動系統
全驅動系統