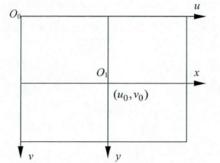
圖像坐標系
以圖像左上角為原點建立以像素為單位的直接坐標系u-v。像素的橫坐標u與縱坐標v分別是在其圖像數組中所在的列數與所在行數。(在OpenCV中u對應x,v對應y)
 像素坐標
像素坐標圖1 圖像坐標系
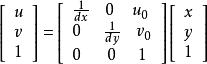
由於(u,v)只代表像素的列數與行數,而像素在圖像中的位置並沒有用物理單位表示出來,所以,我們還要建立以物理單位(如毫米)表示的圖像坐標系x-y。將相機光軸與圖像平面的交點(一般位於圖像平面的中心處,也稱為圖像的主點(principal point)定義為該坐標系的原點O1,且x軸與u軸平行,y軸與v軸平行,假設(u0,v0)代表O1在u-v坐標系下的坐標,dx與dy分別表示每個像素在橫軸x和縱軸y上的物理尺寸,則圖像中的每個像素在u-v坐標系中的坐標和在x-y坐標系中的坐標之間都存在如下的關係:
 像素坐標
像素坐標其中,我們假設物理坐標系中的單位為毫米,那么dx的的單位為:毫米/像素。那么x/dx的單位就是像素了,即和u的單位一樣都是像素。為了使用方便,可將上式用齊次坐標與矩陣形式表示為:
 像素坐標
像素坐標其逆關係可表示為:
相機坐標系
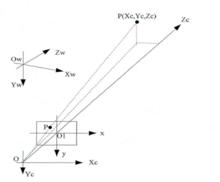
相機成像的幾何關係可由圖2表示。其中O點為攝像機光心(投影中心),Xc軸和Yc軸與成像平面坐標系的x軸和y軸平行,Zc軸為攝像機的光軸,和圖像平面垂直。光軸與圖像平面的交點為圖像的主點O1,由點O與Xc,Yc,Zc軸組成的直角坐標系稱為攝像機的坐標系。OO1為攝像機的焦距。
 像素坐標
像素坐標圖2 相機坐標系與世界坐標系
世界坐標系
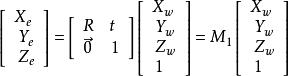
世界坐標系是為了描述相機的位置而被引入的,如圖2.2中坐標系OwXwYwZw即為世界坐標系。平移向量t和旋轉矩陣R可以用來表示相機坐標系與世界坐標系的關係。所以,假設空間點P在世界坐標系下的齊次坐標是(Xw,Yw,Zw,1)T,(這裡T是上標轉置),在相機坐標下的齊次坐標是(Xc,Yc,Zc,1)T,則存在如下的關係:
 像素坐標
像素坐標 像素坐標
像素坐標其中,R是3×3的正交單位矩陣(也成為旋轉矩陣),t是三維的平移向量,矢量 ,M1是4×4矩陣。
