 機械昆蟲
機械昆蟲美國正在一個不熟悉的地區作戰,一場戰役即將打響。敵方地面部隊已駐紮下來,準備進攻我方部隊,他們距我方部隊只有3.2公里。但是,敵人並不知道在他們頭頂上飛行的、配有微型攝像機的機械昆蟲正在監視著他們的一舉一動。這些微型機械飛行物稱為微型飛行器(MAV)。
引言
美國國防部正在投入數百萬美元研製這些微型飛行器。有了它們,士兵在執行偵察任務期間便可以有效地保護自己免受傷害。如今,戰鬥期間的情報蒐集工作通常會使小股士兵或者大的飛機處於危險境地。而衛星圖像信息又不能被地面士兵即時獲取。
美國國防部高級研究計畫署(DARPA)正在為幾個研究團隊提供資金,希望研製出長度、寬度和高度都不超過15厘米的微型飛行器。這些微型飛行器將比迄今為止開發的任何無人駕駛飛行器(UAV)都要小一個量級。其中一類微型飛行器的設計模仿了某些昆蟲(包括蒼蠅、蜜蜂和蜻蜓)的飛行動作。在本文中,我們將關注這些與昆蟲類似的微型飛行器。你將了解到蒼蠅如何飛行、如何製造模擬蒼蠅飛行的機器,以及這些微型飛行裝置將部署到何處。
研究昆蟲飛行
關於飛行,蒼蠅可以教給我們很多知識,這些知識我們是無法通過研究固定翼飛機學到的。多年以來,人們很少了解昆蟲飛行的原理,但它們卻是地球上最古老的飛行家,有時人們稱之為自然界的噴氣式戰鬥機。您可能聽說過,根據傳統的空氣動力學理論,大黃峰是不能飛行的。這是因為昆蟲的飛行原理與固定翼飛機的飛行原理是不同的。
加州大學伯克利分校的生物學家麥可·迪金森(Michael Dickinson)說“工程師們稱可以證明大黃峰不能飛行”,“如果你將固定翼飛機的理論套用到昆蟲身上,你確實會推斷出它們不能飛行。你必須運用某種不同的理論”。
 伯克利研究人員手中的微型機械飛行昆蟲模型
伯克利研究人員手中的微型機械飛行昆蟲模型迪金森參與了微型機械飛行昆蟲(MFI)項目,這個項目組的成員正在利用昆蟲的飛行原理研製小型飛行機器人。此項目是與DARPA合作開發的。MFI項目組計畫研製一種寬度為10到25毫米的機械昆蟲,這比DARPA的尺寸限值15厘米要小得多,這種機械昆蟲將通過扇動翅膀的方式來飛行。項目的目標是再現麗蠅的飛行方式。
如果您讀過飛機如何飛上藍天?這篇文章,您會知道飛機之所以能產生升力,是因為機翼上方空氣的流動速度要比機翼底部的快。這稱為穩態空氣動力學。這個原則不適用於蒼蠅或者蜜蜂,因為在飛行期間,它們的翅膀一直處於運動狀態。
康奈爾大學工程學院的物理學家Z. Jane Wang說:“與固定翼飛機擁有穩定、幾乎沒有粘性(沒有粘度)的流體動力特性不同,昆蟲是在鏇渦流中飛行,它們被翅膀扇動引起的微型鏇渦和鏇風包圍著。鏇渦是翅膀造成的渦流,漩渦中空氣的流向與空氣主流的方向相反。”
昆蟲產生的鏇渦使它們留在空中。迪金森的團佇列舉了三個原理來解釋昆蟲如何獲得升力並在空中停留:
延時失速——昆蟲以一個較高的迎角向前扇動翅膀,以一個比普通飛機機翼還陡的角度切割空氣。在這樣陡的角度,固定翼飛機將會失速、失去升力,機翼上的阻力將會增加。昆蟲翅膀引起的前緣渦位於翅膀的表面,可以產生升力。
環流——在擺動結束階段,昆蟲翅膀向後鏇轉,產生一個使昆蟲上升的迴旋,類似於使桌球上升的迴旋。
尾流捕捉——在翅膀穿過空氣運動時,它會在身後留下渦流或者鏇渦。當昆蟲鏇轉翅膀準備返回時,它切入自身的尾流,捕捉足夠的能量使自己上升。迪金森稱,即使在翅膀停止扇動之後,昆蟲也可以從尾流獲得升力。
迪金森說:“如果我們通過建造昆蟲機器人來利用這些機制,真是太妙了。但現在你無法基於已知原理來建造它們——您必須從基本原理上重新思考這個問題。”在下一部分中,您將了解研究人員如何將這些原理套用到機械飛行昆蟲的研製上。
Entomopter的基本部件
至少有兩個由DARPA資助的MAV項目受到了昆蟲飛行原理的啟發。麥可·迪金森在伯克利製造微型機械飛行昆蟲的同時,喬治亞理工學院的一名研究工程師羅伯特·米切爾森正致力於Entomopter的研製。我們來仔細了解一下這兩個項目。
2000年7月,美國專利局將一項專利授予了喬治亞技術研究公司(Georgia Tech Research Corporation),因為該公司的米切爾森發明了Entomopter,又稱為多模態電子機械昆蟲。根據美國專利第6,082,671號,Entomopter是為了室內操作而設計的。它將通過扇動翅膀產生升力來模擬昆蟲的飛行。此外,科研人員正在研究使Entomopter可以在走廊和通風系統穿行和在門下爬行的方法。
我們來看一下Entomopter的基本部件:
機身——正如體積較大的飛機一樣,這是機器的外殼,裡面裝有電源和主燃料箱。Entomopter的所有其他部件都連線到機身上。
機翼——有兩個翅膀,分別位於前部和後部,以一個X形配置通過樞軸方式裝到機身上。這些翅膀由薄膜製成。堅硬而靈活的翅脈在機身連線處連線到翅膀上,為翅膀提供所需的曲線,以便在上揮和下拍時都能產生升力。
往復化學肌肉(RCM)——一個緊湊、非燃燒發動機連線到翅膀上,以產生振動動作。
感測器——感測器負責偵察前方、下方和側面的情況。
攝像機——原型中沒有配備迷你攝像機,但最終版可以攜帶一個攝像機或者嗅覺感測器。這種感測器將檢測氣味,Entomopter將跟蹤氣味,直至找到氣味的源頭。
表面操縱機制——當Entomopter用於地面任務時,這項機制可幫助導航。
腿/腳——也稱為表面移動發動機,這些部件可提供反搖擺慣量和輔助燃料存儲。
Entomopter通過化學反應提供動力。將單元推進劑注入到機身,產生可釋放氣體的化學反應。氣體壓力逐漸增大,擠壓機身中的活塞。此活塞通過樞軸方式與翅膀相連,使翅膀快速振動。有些氣體通過翅膀中的通風孔排出,可用於改變任一翅膀上的升力,使裝置可以轉彎。目前,Entomopter的翼展為25厘米。米切爾森說:“下一步是將RCM裝置的體積降到昆蟲那么大。”
在家蠅大小的裝置中,每個零件都必須執行多項任務。例如,一個連線到裝置背部的無線電天線也可以充當導航穩定器。腿部可以存儲燃料,以調整裝置重量並在飛行中起平衡作用。
微型機械飛行昆蟲
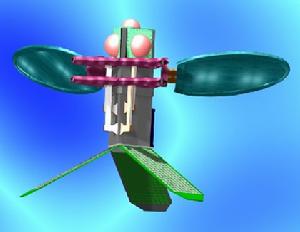 伯克利已研製完成的微型機械飛行昆蟲的藝術概念圖
伯克利已研製完成的微型機械飛行昆蟲的藝術概念圖美國政府還在伯克利項目中投入250萬美元,以開發尺寸只有普通家蠅大小的機器昆蟲。使微型機械飛行昆蟲(MFI)能停留在空氣中的第一個重要步驟是機器蠅(Robofly)的研製,機器蠅使研究人員可以深入了解昆蟲的飛行機制。
為了製作微型機械飛行昆蟲,研究人員通過試驗來了解蒼蠅的飛行原理。其中一個試驗還製作了一對寬度為25厘米的機器翅膀,名為機器蠅,它以果蠅的翅膀為原型,由樹脂玻璃製成。機器翅膀浸在一罐礦物油中,礦物油迫使機器翅膀像長度為1毫米的果蠅翅膀那樣在空氣中快速振翅。六個馬達——每個翅膀上三個,用於使翅膀前後、上下移動並做出鏇轉動作。連線的感測器用於測量翅膀的作用力。
最後,機器蒼蠅可以縮小成不鏽鋼微型機器蠅,寬度為10-25毫米,重量為43毫克。翅膀將由聚酯薄膜製成。太陽能將驅動一個壓電驅動器來推動翅膀振動。機器蠅的胸腔部位將壓電驅動器偏移轉換為實現飛行所需的大幅度翅膀擺動和鏇轉。
儘管機器蠅還不能飛,但是根據報告,在試驗中,利用完全運轉的雙翅結構已經可以實現升空所需作用力的90%左右。下一步是添加一個飛行控制裝置和通信裝置,從而實現遙控。研究人員稱,他們正致力於通過光學感應和機載陀螺儀來支持受控式盤鏇。
微型飛行器的作用
考慮美國軍方在微型飛行器項目上所投入的資金,這些機械昆蟲頭一次可能要作為偵察蠅來使用。DARPA設計了一種可用於執行偵察任務並由地面上的士兵進行控制的偵察蠅。這種小型飛行裝置不會傳輸部隊行動的圖像,但可用於檢測生物武器、化學武器或者核武器。此外,機械昆蟲還可以停靠在敵方車輛上,將電子標籤放在上面,從而更容易定位目標。
在DARPA針對微型飛行器開發問題而提供的《1997年年度報告》中,作者論述了微技術(包括微電子機械系統(MEMS))的發展將很快使偵察蠅成為一種可行的設計。他指出,正在製作的微系統,如CCD陣列攝像機、微型紅外感測器以及晶片大小的危險物質探測器,它們的尺寸將小到足以集成到一個偵察蠅的結構中。
軍方需要的是行動範圍在10公里左右的微型飛行器,這些飛行器可以在白天或者夜晚飛行,並可在空中停留1個小時左右。DARPA官員表示,微型飛行器的理想時速為35.4公里到72.4公里。對它們的控制工作將通過地面站來完成,地面站將使用定向天線並與微型飛行器一直保持聯繫。
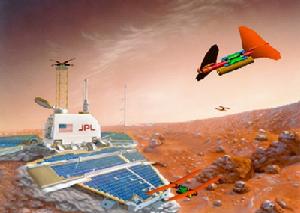 一支由Entomopter組成的隊伍探索火星的藝術概念圖
一支由Entomopter組成的隊伍探索火星的藝術概念圖機器蠅很適合作為新一代的星際探測器。喬治亞技術研究所(GTRI)已經收到NASA先進理念研究所(NIAC)提供的資金,用於研究將Entomopter用作火星飛行探測器這一設計思想。2001年3月,NASA為此研究的第二階段提供了資金,以期將來能夠實現火星微型飛行器探測。
與體積更大的偵察工具相比,Entomopter有幾點優勢。它們可以著陸、起飛、盤鏇並在飛行期間執行難度更高的技術動作。它們的爬升和飛行能力也為它們探索其他星球提供了優勢。NASA很可能會傳送數十個這樣的偵察裝置來探索其他星球。Entomopter研製者羅布·米切爾森說,對於為探索火星而研製的Entomopter,其體積必須加大,翼展將達到1米左右,這樣才能在火星稀薄的大氣中飛行。
研究人員表示,這些微型飛行機器在自然災害(如地震、龍捲風或者山體滑坡)之後也可以發揮很大作用。它們體積小,可以飛行和盤鏇,適合用來搜尋埋在碎石中的人們。它們可以在搜救人員和較大機械設備無法抵達的裂縫中飛行。它們的其他用途包括交通監控、邊境監視、野生動植物調查、電力線路巡查以及房地產航拍。
此外,偵察蠅還是一個展示科技力量的例子,它讓我們看到了科技在幫助人類安全完成危險任務方面所發揮的重大作用。軍事偵察、搜尋地震的受害者,以及飛往其他世界都是一些危險性活動——擁有飛行能力的微型機器使我們可以完成這些工作而無需親臨現場。
