
簡介
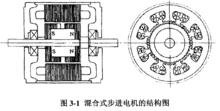
混合式步進電機由定子和轉子兩部分組成。常見的定子有8個極或4個極,極面上均勻分布一定數量的小齒;極上線圈能以兩個方向通電,形成A相和萬相,B相和B相。它的轉子也由圓周上均布一定數量小齒的兩塊齒片等組成。這兩塊齒片相互錯開半個齒距。兩塊齒片中間夾有一隻軸向充磁的環形永久磁鋼。顯然,同一段轉子片上的所有齒都具有相同極性,而兩塊不同段的轉子片的極性相反。混合式步進電機的結構圖如圖3-l.圖3-2是四相混合式步進電機以圓周展開的剖面模型。上圖是轉子S極所出的剖面圖,下圖是N極剖面圖。圖中,定子齒距和轉子齒距相同。先考慮磁極I和磁極IB下面的磁場。定子線圈通電後,磁極I產生N極,磁極m產生S極 。
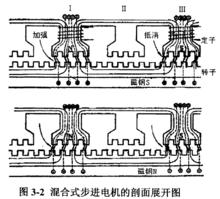 二相混合式步進電機
二相混合式步進電機 因為N極這段的轉子齒和S極轉子齒相互錯開半個齒距,所以,僅靠定子電流磁場並不能向磁阻式電機那樣產生有意義的轉矩。但是,把永久磁鋼產生的磁場疊加上去,情況就不一樣了。因為磁極I下面的兩冷磁場相互增強,因此產生向左的驅動力;而磁極m下面的兩個分量相互抵消,向右的力大大削弱。再看下圖,磁極m下面的定子磁場和轉子磁場方向相同,磁極I下面的磁場方向相反,最終得到向左的合力。轉子在驅動力的作用下將轉過工齒距,驅動力降為零,達到平衡位置。
 二相混合式步進電機
二相混合式步進電機 如果切斷磁極I、III的激磁,同時向磁極II , IV上的線圈通入電流,分別產生S極和N極。轉子將向左再走一步。按照特定的時序激磁,如A-B -A -B-A-"',電機就能沿逆時針方向連續旋轉。改變激磁時序,以A-B-A-B-A-…激磁,電機將沿順時針方向連續旋轉。
二相混合式步進電機細分驅動原理
混合式步進電動機內部結構特殊,是一類高度非線性的機電裝置。 1986年Hanselman採用磁場的“磁網路單元法”來計算反應式步進電機的磁場。1988年,G Heine提出了精確的混合式步進電機的等值磁網路模型,首次在模型中考慮了定子極間漏磁通,每極邊緣轉矩對電機矩角特性及步距誤差的影響,分析了四相混合式步進電機諧波轉矩對電機矩角特性及步距誤差的影響,但是這種模型耗費的機時量仍然很大 。
為簡化數學分析, 沿用G.Heine提出的混合式步進電機等值磁網路模型,以典型的二相八極混合式步進電動機,忽略鐵心飽和和高次諧波對電機磁系統的影響 (鐵心飽和和高次諧波往往是步進電機極限運行時的狀況,正常運行時,不會對定性分析的結論有原則性的影響),建立了分析細分驅動的簡化基本數學模型。混合式步進電動機繞組電感參數的特點與普通電機有區別,具有軸向和徑向混合的磁系統,定轉子雙凸結構。如圖2-1所示的二相混合式步進電機磁網路模型簡化磁路圖,定子八個極中在直徑上相對的兩個極的電磁狀態完全相同,可以合併。這樣電機的每一端只有4條支路。
步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛套用在各種自戴化設備中。
步進電機是將電脈衝信號轉變為角位移或線位移的開環控制元件。當步進驅私器接收到一個脈衝信號,它就驅動步進申機按設定的方向轉動一個固定的角度(即步進角)。可以通過控制脈衝個數來控制角位移量,從而達到準確定位的目的。
兩相混合式步進電機的結構
 二相混合式步進電機
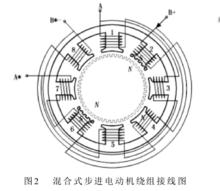
二相混合式步進電機 工業控制中採用如圖1所示的定子磁極上帶有小齒,轉子齒數很多的結構,其步距角可以做得很小。如圖1兩相混合式步進電動機的結構圖,和圖2步進電機繞組接線圖A,B兩相繞組沿徑向分相,沿著定子圓周有8個凸出的磁極,1,3,5,7磁極屬於A相繞組,2, 4, 6, 8磁極屬於B相繞組,定子侮個極面上有5個齒,極身上有控制繞組。轉子由環形磁鋼和兩段鐵芯組成,環形磁鋼在轉子中部,軸向充磁,兩段鐵芯分別裝在磁鋼的兩端,使得轉子軸向分為兩個磁極。轉子鐵芯上均勻分布50個齒,兩段鐵芯上的小齒相互錯開半個齒距,定轉子的齒距和齒寬相同 。
兩相混合式步進電機的工作過程
當兩相控制繞組按AA BB或BB AA的次序輪流通電,侮拍只有一相繞組通電,四拍構成一個循環。當控制繞組有電流通過時,便產生磁動勢,它與永久磁鋼產生的磁動勢相互作用,產生電磁轉知,使轉子產生步進運動。
當A相繞組通電時,在轉子N極端磁極1上的繞組產生的S磁極吸引轉子N極,使得磁極1下是齒對齒,磁力線由轉子N極指向磁極1的齒面,磁極5下也是齒對齒,磁極3和7是齒對槽,如圖4所示A相通電轉子N極端定轉子平衡圖。由於兩段轉子鐵芯上的小齒相互錯開半個齒距,在轉子S極端,磁極1'和5’產生的S極磁場,排斥轉子S極,與轉子正好是齒對槽,磁極3’和7’齒面產生N極磁場,吸引轉子S極,使得齒對齒。A相繞組通電時轉子N極端,S極端轉子平衡圖。
因轉子上共有50個齒,其齒距角為3600 /50=720_寧子仇個極即所占的街數為不是整數,因此當定子的A相通電,在轉子N極,磁極1的5個齒與轉子齒對齒,旁邊的B相繞組的磁極2的5個齒和轉子齒有1/4齒距的錯位,即1.80,如圖4所示A相通電時定轉子齒展開圖畫圓圈的地方,A相磁極3的齒和轉子就會錯位3.6 0,實現齒對槽了。磁力線是沿轉子N端~A(1)S磁極~導磁環~A(3' )N磁極~轉子S端~轉子N端,成一閉合曲線。當A相斷電B相通電時,磁極2產生N極性,吸合離它最近的S極轉子7齒,使得轉子沿順時針方向轉過1.80,實現磁極2和轉子齒對齒,B相繞組通電定轉子齒展開圖如圖5所示,此時磁極3和轉子齒有1/4齒距的錯位。依次類推若繼續按四拍的順序通電,轉子就按順時針方向一步一步地轉動,侮通電一次即侮來一個脈衝轉子轉過1.80,即稱步距角為1.80,轉子轉過一圈需要3600 /1.80 =200個脈衝 。
在轉子S極端也是同樣道理,當繞組齒對齒時,其旁邊一相磁極錯位1.803步進電機驅動器步進電機必須有驅動器和控制器才能正常工作。驅動器的作用是對控制脈衝進行環形分配、功率放大,使步進電機繞組按一定順序通電,控制電機轉動。
步進電機42BYG250C的驅動器為SH20403。為lOV} 40V直流供電,A+, A-,B+, B-端子要連線步進電機的四條引線,DC+, DC-端子接驅動器工作直流電源,輸入接口電路包括公共端(接輸入端子電源正極)、脈衝信號輸入端(輸入一系列脈衝,內部分配以驅動步進電機A,B相)、方向信號輸入端(可實現步進電機的正、反轉)、脫機信號輸入端 。
步進電機驅動器輸入端子功能:
公共端:將輸入信號的電源正極連線到該端子上,為CP,DIR, FREE端子提供,此時對應的內部光禍導通,控制信號輸入驅動器中。
脈衝信號輸入CP:此端子和57-200的高速脈衝輸出端(Q0.0或Q0.1)相連,以發出連線高速脈衝驅動步進電機。
方向信號輸入DIR:此端子和57-200的輸出端Q0.2相連,其高電平和低電平控制電機的兩個轉向。
脫機信號FREE:此端為低電平有效,這時電機處於無力知狀態
套用中存在的不足
因為在實際的套用當中,步進電機為伺服系統的執行元件,所以設計中比較注重位置定位精確和產生較大轉矩等方面,從而在定轉子的設計中均為凸極結構並會在極上開有小齒,造成了氣隙磁場存在著較大的空間諧波,從而導致電機的轉矩脈動和轉速波動也會比較大,容易產生噪聲以至於振盪。由於混合式步進電機的氣隙磁場分別是由轉子永磁體和定子勵磁繞組產生的,所以受磁路飽和的影響,當二者相互加強的時候,合成的磁通通常是小於兩者的線性疊加,這時電機的磁場處於過飽和狀態,運行效率比較低。另外從混合式步進電機的矩頻特性可以看出,在轉速達到一定數值後,輸出轉矩會很明顯的下降,容易失步,有關學者曾就此做了研究提出了降低電流參考值的處理方法,但是也只有一定效果,進一步還提出了減少匝數、增大電流的解決方案,還有人為了增大步進電機高頻時的輸出轉矩提出了減小電機繞組的L/R時間常數的方法 。
這些問題也歸結為一個振盪和失步的問題。振盪的根本原因是轉子到達平衡位置是還有多餘的動能,對於此問題,一般採用阻尼和細分控制技術就可以達到較好的輸出效果,有些國外的學者通過建立共振檢測模型,調節勵磁繞組電流的方、法來改善步進電機的這個問題,還有在對步進電機繞組電流中的諧波分量進行分析過後,通過建立共振閥值模型來對繞組電壓進行補償的辦法。而失步的問題有研究顯示,轉子速度慢於步進電機旋轉磁場速度、步進電機及所帶負載存在的慣性、步進電機產生的共振等這些現象是嚴生失步的原因,可以通過最佳化步進電機的加減速曲線,有效的應對慣性轉矩對失步產生的影響,還有採用細分控制技術解決這類問題。
從上述問題可以看出,混合式步進電機因其控制方面的要求,在設計電機本體的時候就對於電機的諧波控制、運行時的穩定性能方面考慮較少,所以在高速運行時轉矩的下降會很快,同時工作時的運行效率變低,轉矩脈動比較明顯,造成較大的電機轉速波動和振動噪聲。但是上述問題提到的一些解決方法都是屬於步進電機開環控制方式下的最佳化措施,這樣的條件下忽略了轉子永磁體產生的磁場對合成磁場發揮的作用,控制的效果並不是很好,所以在這種情況下採用其他控制方式則是另一個比較好的手段。
控制方式的研究現狀
電機的數學模型是控制算法的基礎,步進電機的數學模型也是因為數學理論的成熟逐漸發展起來,其中Singh-Kuo模型是有代表性的模型,這個模型忽略了磁滯和渦流損耗,假設相繞組中產生的磁鏈隨轉子位置角按正弦規律變化,繞組電感與轉子位置無關等;之後出現了較S ingh-Ku。的改進型的Pickup-Russell模型,該模型認為繞組磁鏈是繞組電流和轉子位置的函式[0l; A.C.Leenhouts等人借鑑Pickup-Russell模型將繞組磁鏈隨電流變化關係用電感係數來表示,提出Leenhouts模型 。
混合式步進電機系統的性能很大程度取決於控制器的優劣,從前述可以看到步進電機主要有開環、閉環、矢量和智慧型控制等控制方式。開環控制使用方便,系統構成簡單且成本低,在精度要求不太高的場合有著廣泛的套用,至今也沒有合適的替代產品。但如前所說,這種方式存在一個振盪的區域,尤其是低速運行時接近電機的共振區,此時振動和噪聲都比較大。但是對開環控制的改進也是不斷地在進行中,自1975年美國學者T. R. Frederickson首次在美國增量運動控制系統及器件年會上提出了步進電機步距角細分的控制方法後[ysl,隨著微電子和電力電子技術的發展,當前世界上混合式步進電機新技術正處在高速的發展之中,智慧型控制的V}想進入了步進電機的驅動控制領域,還出現了具有實時可變的細分一功能驅動控制電路。通過這些年的發展,步進電機控制方式逐漸形成了升頻升壓控制,恆流斬波控制,細分控制,矢量控制,位置、速度反饋控制等控制方式,但是新型控制方式的運用還不成熟,也沒有出現相關產品,而國內雖然研究上取得很大進步但不管是控制器還是控制軟體上看,和國外還有一定的差距。目前國內外混合式步進電機控制系統在實際中主要有:基於微控制器設計的專用集成晶片,基於單片機微處理器等,基於CPLD和PFGA和基於 DSP實現的控制系統,隨著各個新型控制方式的出現,將高運算速度、功能強大的DSP套用到控制器當中,也是目前研究的熱點方向
而隨著神經網路技術的發展,對於混合式步進電機這種數學模型難以得到的電機來說,神經網路卻提供了良好的控制工具。神經網路是一種能自學習及自適應不確定系統的智慧型控制方法,它對很複雜的非線性系統都可以在很大程度上逼近模擬,並具有極好的容錯性和魯棒性,所以隨著神經網路技術的不斷發展,各項研究也開始越來越多地關注其在步進電機系統中的套用。有研究將神經網路用於實現步進電機最佳細分電流,在學習中使用Bayes正則化算法,使用權值調整技術避免多層前向神經網路陷入局部極小點,有效解決了等步距角細分問題。
