
工程學概念
作法一
效果圖見圖1:
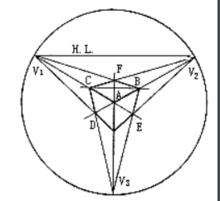 圖1 三點透視圖
圖1 三點透視圖1.由圓的中心A距120°畫三條線,在圓周交點為V1、V2、V3,並定V1-V2為H.L。
2.在A的透視線上任取一點為B。
3.由 B到 H. L.作平行線,和 A-V1的交點為CA的透視線及C、D至各消失點的透視線得E、F、G完成透視。
作法二
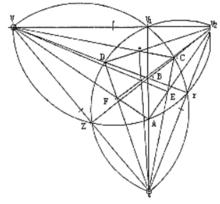 圖2
圖21. 在H.L設V1-V2,二等分處設X。
2. 以X為圓心畫通過V1、V2的圓弧。
3. V1-V2間任設Vc點,畫垂線和前圓弧交點為A。
4. 取Vc-A間的任意點B,由V1、 V2通過B延長的透視線和前圓弧交Y、Z點。
5. V1和 Z,V2和 Y連結線的延長在Vc-A的垂直線上相交,為第三消失點V3。
6. V1-V3,V2-V3視為H.L.,反覆作圖可得C、D點。
7.由A的透視線及C、D至各消失點的透視線得E、F、G完成透視(圖2)。
作法三
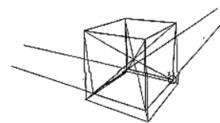 圖3
圖3在有角透視圖上作正六面體,畫對角線。 任意傾斜的一個邊角交點X作為基點,求出透視(圖3)。
美術概念
基本定義
三點透視有三個消失點,高度線不完全垂直於畫面。
詳細術語
根據站點的高低,高度線或消失於天空中的天點,或消失於地面中的地點,另外兩組深度線延長與視平線形成兩個消失點,消失在地平線上,另一個消失點消失在天空或地面。
基於三點透視的人臉姿態估計算法
基於一幅靜止圖像的人臉姿態估計技術在人臉識別領域中有著重要的實際套用。在人臉識別門禁系統中,要求在距離攝像頭20cm到100cm、左右鏇轉在-45°—+45°、上下鏇轉在-35°—+35°的範圍內獲取人臉圖像,然後對其進行識別處理。通常該門禁系統需要將當前人臉圖像與資料庫中的所有人臉圖像進行一一比對,既增加了處理時間又增加了誤識率。如果在人臉識別系統中加入人臉姿態估計功能,則系統不但可以均勻採集各種姿態的人臉模板,而且還可以根據當前人臉圖像的姿態,在具有相似姿態的人臉模板庫中進行人臉比對處理,這樣可以大幅度提高系統的識別速度,同時也可降低誤識率。
基於靜止圖像的人臉姿態估計方法可分為幾何模型法、模板匹配法、非線性回歸法、特徵空間描述法和檢測器陣列法等五大類。
幾何模型法
幾何模型法使用幾何結構來描述人臉建立模型與人臉的對應關係。主要有基於五個特徵點的交比模型、弱透視投影模型等方法。幾何模型法的優點是算法簡單,速度快,對特徵點的精確定位是個關鍵處理。Horprasert 的算法利用了四個眼角點以及鼻尖點之間的結構關係,通過計算眼角連線與軸的夾角求得平面內繞軸的鏇轉角度,通過眼角點的交比射影不變性來求得人臉左右鏇轉角度,通過鼻子與眼睛的長度之比求得人臉上下鏇轉角度;該方法只適用於人臉單獨上下鏇轉或者單獨左右鏇轉,算法建立的模型沒有充分考慮混合姿態的情況提出了基於弱透視原理和人臉統計模型的人臉姿態估算法,即將眼角線中點與嘴角線中點的連線作為人臉對稱軸,利用人臉統計模型參數在對稱軸上找到鼻下點,並設從鼻下點指向鼻尖點的向量為人臉方向,從而求得人臉姿態;該算法比較適合小角度變化的人臉姿態估算,當鏇轉角度較大時,眼睛線中點與嘴角線中點的連線不能近似作為人臉對稱軸來使用,此時找到的鼻下點坐標誤差較大,影響人臉姿態的估算。利用在三維世界坐標中不相交的平行線,由於透視原理在二維圖像平面內會相交於滅點的原理,提出了基於眼角線與嘴巴線的長度比例關係的人臉姿態算法;其缺點是當鏇轉角度偏大時,會無法求得外眼角的坐標,從而使算法失效的方法是建立人臉結構模型,對圖像進行歸一化處理,並找到圖像特徵點位置信息與人臉姿態之間的對應關係據此計算出人臉姿態;該方法的缺點在於人臉到攝像機的距離必須是固定的,沒有考慮任意位置的人臉姿態估計。
模板匹配法
模板匹配法是將圖像與樣本模板進行比較,找出最接近的姿態對每個人採集張不同姿態圖像作為模板在姿態估計時將輸入圖像與模板進行匹配,找到大致姿態。這種方法的假設前提是有問題的,實驗表明兩幅人臉圖像的相似度與人臉姿態的相似度不一定是對應關係。換言之,用該算法有時會得出,同一個人的不同姿態會比不同人的相同姿態的相似度更高。
非線性回歸法
非線性回歸法是通過機器學習,建立一個從三維到二維的非線性映射函式來估計人臉姿態。高維數據進行降維處理後,用支持回歸向量求出非線性回歸方程。使用兩個多層次神經網路方法來得到姿態這種方法受人臉定位誤差和圖像質量變化的影響很大。
特徵空間描述法
特徵空間描述法假定在某些特徵空間上,人臉姿態與某些特定的特徵信息有對應關係,並可以通過訓練來找到該對應關係。提出了構造全局特徵空間和局部特徵空間的方法,先在全局特徵空間中確定圖像屬於哪一個人再在該人的局部特徵空間中確定人臉姿態該算法的準確度與訓練樣本,以及用於描述人臉的特徵空間有關,得到的實驗結果不穩定。
檢測器陣列法
該方法使用個檢測器來檢測在個自由度上的人臉姿態該方法的缺點是,為了估算各種不同的姿態,理論上講就必須訓練出各種不同姿態的分類器。
透視變換法
利用空間點的透視變換原理提出了一種基於特徵點透視變換和人臉統計模型的人臉姿態估計法:將三點透視的姿態估計算法運用在人臉姿態估計上。算法建立以左右眼睛點和鼻尖為幾何特徵點的人臉統計模型,推導出這個特徵點在圖像平面坐標系和世界坐標系間的對應關係,根據這個關係可以得到從圖像平面上的個特徵點來估算人臉在三維空間姿態的理論方程組。由於這個方程組的顯式解難以求得,我們採用疊代方法來給出完整的快速人臉姿態估計算法。在圖像庫上的實驗結果表明,算法左右鏇轉平均誤差約為6.9°,上下鏇轉誤差約為3.1°,單張圖像的處理速度約為5ms。
