
發展沿革
研製背景
波音公司提出的CRW(Canard Rotor/Wing)——鴨翼-旋翼/機翼轉換技術,這一概念現的原理試驗機X-50“蜻蜓”。
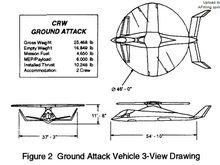
在上世紀90年代,美國空軍、海軍和海軍陸戰隊開始共同尋求一種成本低廉且生存能力強的垂直起降飛行器,以支援在分散在沿海或城市中的地面部隊。為了滿足要求,麥道公司開始了一項名為CRW的概念研究。新的CRW不需要任何地面支援設備就能夠完成任一地點的垂直起降,同時具備以375節速度巡航飛行的能力。
原型試飛
不久後,麥道公司被波音購併,CRW概念的研究工作自然也轉到了波音門下。1998年6月,美國國防部先進研究計畫局(DARPA)和波音公司簽訂了一項2400萬美元的協定,製造CRW概念飛機。波音的鬼怪工廠(Phantom Works)通過37個月的努力,製造了這種新技術的概念驗證機——X-50A“蜻蜓”。
 X-50A“蜻蜓”無人機
X-50A“蜻蜓”無人機2003年12月4日上午8時10分,波音公司的X-50A概念驗證機在亞利桑那州的美國陸軍尤馬(Yuma)試驗場成功完成了首次懸停試飛,懸停時間為80秒,高度12英尺。完成懸停後,X-50A開始盤旋並降落,成功結束了試飛。不幸的是在2004年3月23日,第一架——也是唯一的一架X-50A因控制交叉耦合而墜毀。
2005年11月4日,第二架X-50A飛機製造完成並開始投入試飛,並在12月完成了兩次成功的試驗。這些試驗成功地驗證了硬體和飛控系統。2006年第一季度,第二架X-50A原型機完成了11次試驗,研製工作也在不斷地向前推進。然而在2006年4月12日,第2架原型機也同樣墜毀了。隨後的調查顯示飛機的機身受到了嚴重的氣流擾動,在兩個方向的空速發生疊加而且機翼仍處於旋翼的旋轉工作狀態時,飛機會產生一個難以恢復的抬頭力矩,直接導致了飛機失控墜毀。這也使得DARPA於2006年9月決定終止這項計畫。
技術特點
 X50A無人機
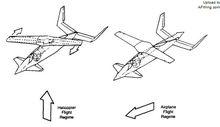
X50A無人機波音公司採用CRW(Canard Rotor/Wing,鴨翼-旋翼/機翼)概念的X-50“蜻蜓(Dragonfly)”,飛行方式能夠在直升機和固定翼飛機間進行轉換。
 X50A無人機
X50A無人機起飛、降落和懸停時,飛行方式與直升機相同:飛機發動機通過減速器將功率輸出以驅動雙葉螺旋槳旋轉,為飛機提供升力。而抗自旋扭矩則通過類似於MD500無尾槳直升機的NOTAR(NO TAIL ROTOR,“無尾槳”)系統實現——風扇向尾梁內部提供低壓氣流。氣流從尾梁的長縫中噴出,與旋翼尾流匯合形成環量,產生平衡反扭矩的側力。尾梁內未噴出的空氣流向尾部,從可控制的噴氣錐直接噴出,以提供航向操縱推力。
完成起飛後,可以在空中將兩片旋翼分別對稱固定在機身兩側後掠位置,轉為以機翼方式提供升力,而發動機則直接輸出推力令飛機前行,能夠像普通飛機一樣巡航飛行,以獲得比直升機高得多的速度。同時為了更好地控制飛機的俯仰操作,機身前端在巡航飛行狀態或放出鴨式仰角發生器,作用類似於鴨翼,起到對飛機俯仰方向的控制作用。
性能數據
不詳。
服役事件
項目取消,未投入量產服役。
總體評價
2葉/平直翼,就是採用寬弦剛性槳轂可鎖定的兩用旋翼/機翼,來有效融合直升機的垂直起降和固定翼飛機的高速度兩方面特點,但是和普通直升機及固定翼飛機相比,這種飛機的懸停和非常規機動性能還是受到一點損失的,有可能垂直性能不如直升機、水平性能不如固定翼飛機。
而這其中最大的技術問題還是轉換飛行期間的飛行控制問題,處理不好很容易失事。而且轉換飛行也有速度和高度的限制,不是隨時隨地都可以轉換的。在戰鬥中,這個轉換時間和高度、速度的要求給戰術動作帶來很大的困擾,升力機制的轉換幾乎只能在接戰前完成,這對於這種類型飛機的性能發揮是個很大的限制。
