基本簡介
 RI-MAN機器人
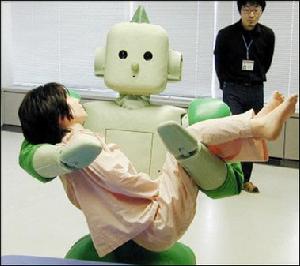
RI-MAN機器人RI-MAN機器人是由日本名古屋理研生物模擬控制研究中心開發的醫用搬運工模型。它不僅有柔軟、安全的外形,手臂和軀體上還有觸覺感受器,使它能小心翼翼地抱起或搬動患者。從長遠來看,RI-MAN機器人能取代護工去照顧老人或體弱多病者。
這種名為“RI-MAN”的機器人身高158厘米,重約100公斤,全身覆蓋著厚約5毫米的柔軟矽材料。它能夠自動協調身體各個部位馬達的輸出功率,產生和人類差不多大小的力氣。
設計特點
該機器人身上有5個部位安裝了柔軟的觸覺感測器,能感受一定的壓強。它還配置了視覺、聽覺和嗅覺感測器,可根據聲源定位並通過視覺處理找到呼喚它的人,理解聲音指令,然後橫抱起模擬被護理者的人偶。除流暢地完成這一系列動作外,該機器人還能夠通過嗅覺感測器來判斷懷抱的護理對象的健康狀況。
負責設計“RI-NAM”的研究人員說,他們參照人類的神經系統,利用特定的構造和裝置分別模擬人類的大腦、小腦和脊髓,成功開發出了可對機器人全身進行操控的網路系統。研究人員說,在緊急時刻,這種機器人能像人類條件反射一樣對外界環境作出快速反應。日本大阪護理學院老年醫學專家臼井教授認為,“(在老年人護理過程中)人際互動交流、談話等對病人至關重要,單純地聽聽音樂看看電視遠遠不夠”,因此機器人被認為是比較理想的一個選擇。
