
背景介紹
隨著電子技術的發展,出現了多種PWM技術,其中包括:相電壓控制PWM、脈寬PWM法、隨機PWM、SPWM法、線電壓控制PWM等,而在鎳氫電池智慧型充電器中採用的脈寬PWM法,它是把每一脈衝寬度均相等的脈衝列作為PWM波形,通過改變脈衝列的周期可以調頻,改變脈衝的寬度或占空比可以調壓,採用適當控制方法即可使電壓與頻率協調變化。可以通過調整PWM的周期、PWM的占空比而達到控制充電電流的目的。
模擬信號的值可以連續變化,其時間和幅度的解析度都沒有限制。9V電池就是一種模擬器件,因為它的輸出電壓並不精確地等於9V,而是隨時間發生變化,並可取任何實數值。與此類似,從電池吸收的電流也不限定在一組可能的取值範圍之內。模擬信號與數位訊號的區別在於後者的取值通常只能屬於預先確定的可能取值集合之內,例如在{0V,5V}這一集合中取值。
模擬電壓和電流可直接用來進行控制,如對汽車收音機的音量進行控制。在簡單的模擬收音機中,音量鏇鈕被連線到一個可變電阻。擰動鏇鈕時,電阻值變大或變小;流經這個電阻的電流也隨之增加或減少,從而改變了驅動揚聲器的電流值,使音量相應變大或變小。與收音機一樣,模擬電路的輸出與輸入成線性比例。
儘管模擬控制看起來可能直觀而簡單,但它並不總是非常經濟或可行的。其中一點就是,模擬電路容易隨時間漂移,因而難以調節。能夠解決這個問題的精密模擬電路可能非常龐大、笨重(如老式的家庭立體聲設備)和昂貴。模擬電路還有可能嚴重發熱,其功耗相對於工作元件兩端電壓與電流的乘積成正比。模擬電路還可能對噪聲很敏感,任何擾動或噪聲都肯定會改變電流值的大小。
通過以數字方式控制模擬電路,可以大幅度降低系統的成本和功耗。此外,許多微控制器和DSP已經在晶片上包含了PWM控制器,這使數字控制的實現變得更加容易了。
基本原理
脈寬調製(PWM)基本原理:控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等的脈衝,用這些脈衝來代替正弦波或所需要的波形。也就是在輸出波形的半個周期中產生多個脈衝,使各脈衝的等值電壓為正弦波形,所獲得的輸出平滑且低次諧波少。按一定的規則對各脈衝的寬度進行調製,即可改變逆變電路輸出電壓的大小,也可改變輸出頻率。
例如,把正弦半波波形分成N等份,就可把正弦半波看成由N個彼此相連的脈衝所組成的波形。這些脈衝寬度相等,都等於 ∏/n ,但幅值不等,且脈衝頂部不是水平直線,而是曲線,各脈衝的幅值按正弦規律變化。如果把上述脈衝序列用同樣數量的等幅而不等寬的矩形脈衝序列代替,使矩形脈衝的中點和相應正弦等分的中點重合,且使矩形脈衝和相應正弦部分面積(即衝量)相等,就得到一組脈衝序列,這就是PWM波形。可以看出,各脈衝寬度是按正弦規律變化的。根據衝量相等效果相同的原理,PWM波形和正弦半波是等效的。對於正弦的負半周,也可以用同樣的方法得到PWM波形。
 PWM實際波形圖
PWM實際波形圖 在PWM波形中,各脈衝的幅值是相等的,要改變等效輸出正弦波的幅值時,只要按同一比例係數改變各脈衝的寬度即可,因此在交-直-交變頻器中,PWM逆變電路輸出的脈衝電壓就是直流側電壓的幅值。
根據上述原理,在給出了正弦波頻率,幅值和半個周期內的脈衝數後,PWM波形各脈衝的寬度和間隔就可以準確計算出來。按照計算結果控制電路中各開關器件的通斷,就可以得到所需要的PWM波形。
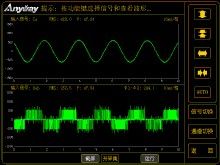
下圖為變頻器輸出的PWM波的實時波形。
分類
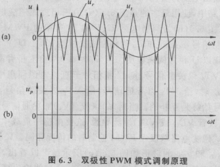 圖6.3
圖6.3 從調製脈衝的極性看,PWM又可分為單極性與雙極性控制模式兩種。
產生單極性PWM模式的基本原理如圖6.2所示。首先由同極性的三角波載波信號ut。與調製信號ur,比較(圖6.2(a)),產生單極性的PWM脈衝(圖6.2(b));然後將單極性的PWM脈衝信號與圖6.2(c)所示的倒相信號UI相乘,從而得到正負半波對稱的PWM脈衝信號Ud,如圖6.2(d)所示。
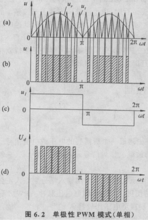 圖6.2
圖6.2 雙極性PWM控制模式採用的是正負交變的雙極性三角載波ut與調製波ur,如圖6.3所示,可通過ut與ur,的比較直接得到雙極性的PWM脈衝,而不需要倒相電路。
除以上兩種從原理不同的角度,對調製方法進行的分類外,近些年採用晶片直接進行脈寬調製的方式被更多的用戶所接受。信號調理領域經常需要面對模擬量信號的傳輸、採集、控制等問題,傳統的信號鏈電路包括模數轉換器(ADC)、數模轉換器(DAC)、運算放大器(OpAmp)、比較器(Comparator)等等,它們扮演者模擬信號處理的主要角色。信號鏈晶片的功能基礎而強大,經過精心的設計後能形成多種多樣優秀的信號處理電路,但即便如此,在很多套用領域,依然存在瓶頸和制約,無法達到理想的電路性能和指標。所以在信號鏈領域渴望出現更多創新的模擬電路處理技術和晶片產品。
一種新型的模擬信號處理專用晶片,它實現了模擬信號向PWM信號高精度轉換功能,我們稱它為APC(Analog to PWM Convertor)。
諧波頻譜
 圖片
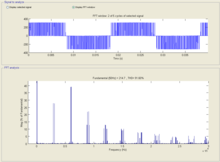
圖片 假設SPWM波的載波頻率為fc,基波頻率為fs,fc/fs稱為載波比N,對於三相變頻器,當N為3的整數倍時,輸出不含3次諧波及3的整數倍諧波。且諧波集中載波頻率整數倍附近,即諧波次數為:kfc±mfs,k和m為整數。
右圖是基波頻率fs=50Hz,載波頻率fc=3kHz,調製比為0.8的SPWM的波形及頻譜的Matlab仿真圖。
圖中58次諧波和60次諧波的幅值分別為27.8%和27.7%,含量最大的諧波為119次和121次諧波,諧波幅值分別為39.1%和39.3%。即最大諧波在兩倍載波頻率附近。
 PWM測量裝置
PWM測量裝置 隨著諧波頻率的升高,諧波幅值整體呈現下降趨勢,按照GB/T22670變頻器供電三相籠型感應電動機試驗方法的規定,變頻電量變送器的頻寬應該在載波頻率的6倍以上,當載波頻率為3kHz時,頻寬至少為18kHz,實際使用建議採用30kHz以上頻寬的變頻功率感測器及變頻功率分析儀。
實際的SPWM波,其載波比不一定為整數,此時,為了降低頻譜泄露,可適當增加傅立葉視窗長度,對多個基波周期的PWM進行傅立葉變換(FFT或DFT)。
具體過程
脈衝寬度調製(PWM)是一種對模擬信號電平進行數字編碼的方法。通過高解析度計數器的使用,方波的占空比被調製用來對一個具體模擬信號的電平進行編碼。PWM信號仍然是數字的,因為在給定的任何時刻,滿幅值的直流供電要么完全有(ON),要么完全無(OFF)。電壓或電流源是以一種通(ON)或斷(OFF)的重複脈衝序列被加到模擬負載上去的。通的時候即是直流供電被加到負載上的時候,斷的時候即是供電被斷開的時候。只要頻寬足夠,任何模擬值都可以使用PWM進行編碼。
多數負載(無論是電感性負載還是電容性負載)需要的調製頻率高於10Hz,通常調製頻率為1kHz到200kHz之間。
許多微控制器內部都包含有PWM控制器。例如,Microchip公司的PIC16C67內含兩個PWM控制器,每一個都可以選擇接通時間和周期。占空比是接通時間與周期之比;調製頻率為周期的倒數。執行PWM操作之前,這種微處理器要求在軟體中完成以下工作:
1、設定提供調製方波的片上定時器/計數器的周期
2、 在PWM控制暫存器中設定接通時間
3、設定PWM輸出的方向,這個輸出是一個通用I/O管腳
4、啟動定時器
5、使能PWM控制器
如今幾乎所有市售的單片機都有PWM模組功能,若沒有(如早期的8051),也可以利用定時器及GPIO口來實現。更為一般的PWM模組控制流程為(筆者使用過TI的2000系列,AVR的Mega系列,TI的LM系列):
1、使能相關的模組(PWM模組以及對應管腳的GPIO模組)。
2、配置PWM模組的功能,具體有:
①:設定PWM定時器周期,該參數決定PWM波形的頻率。
②:設定PWM定時器比較值,該參數決定PWM波形的占空比。
③:設定死區(deadband),為避免橋臂的直通需要設定死區,一般較高檔的單片機都有該功能。
④:設定故障處理情況,一般為故障是封鎖輸出,防止過流損壞功率管,故障一般有比較器或ADC或GPIO檢測。
⑤:設定同步功能,該功能在多橋臂,即多PWM模組協調工作時尤為重要。
3、設定相應的中斷,編寫ISR,一般用於電壓電流採樣,計算下一個周期的占空比,更改占空比,這部分也會有PI控制的功能。
4、使能PWM波形發生。
具體套用
簡介
脈寬調製PWM是開關型穩壓電源中的術語。這是按穩壓的控制方式分類的,除了PWM型,還有PFM型和PWM、PFM混合型。脈寬寬度調製式(PWM)開關型穩壓電路是在控制電路輸出頻率不變的情況下,通過電壓反饋調整其占空比,從而達到穩定輸出電壓的目的。
PWM軟體法控制充電電流
該方法的基本思想就是利用單片機具有的PWM連線埠,在不改變PWM方波周期的前提下,通過軟體的方法調整單片機的PWM控制暫存器來調整PWM的占空比,從而控制充電電流。該方法所要求的單片機必須具有ADC連線埠和PWM連線埠這兩個必須條件,另外ADC的位數儘量高,單片機的工作速度儘量快。在調整充電電流前,單片機先快速讀取充電電流的大小,然後把設定的充電電流與實際讀取到的充電電流進行比較,若實際電流偏小則向增加充電電流的方向調整PWM的占空比;若實際電流偏大則向減小充電電流的方向調整PWM的占空比。在軟體PWM的調整過程中要注意ADC的讀數偏差和電源工作電壓等引入的紋波干擾,合理採用算術平均法等數字濾波技術。
PWM在推力調製中的套用
1962年,Nicklas等提出了脈衝調製理論,指出利用噴氣脈衝對太空飛行器控制是簡單有效的控制方案,同時能使時間或能量達到最優控制。
脈寬調製發動機控制方式是在每一個脈動周期內,通過改變閥門在開或關位置上停留的時間來改變流經閥門的氣體流量,從而改變總的推力效果,對於質量流率不變的系統,可以通過脈寬調製技術來獲得變推力的效果。
脈寬調製通常有兩種方法:第一種為整體脈寬調製,對控制對象進行控制器設計,並根據控制要求的作用力大小,對整個系統模型進行動態的數學解算變換,得出固定力輸出應該持續作用的時間和開始作用時間;第二種為脈寬調製器,不考慮控制對象模型,而是根據輸入進行“動態衰減”性的累加,然後經過某種算法變換後,決定輸出所持續的時間。這種方式非常簡單,也能達到輸出作用近似相同。
脈寬調製控制技術結構簡單、易於實現、技術比較成熟,俄羅斯已經將其成功地套用於遠程火箭的角度穩定系統控制中。但是當調製量為零時,正反向的控制作用相互抵消,控制效率明顯比變流率系統低。而且系統回響有一定的滯後,其開關的頻率必須遠大於KKV本身的固有頻率,否則不但起不到調製效果,甚至會發生災難性後果。
APC晶片是一種新型的模擬信號向PWM的線性轉換晶片,從精度和線性度上都會比555晶片好很多,PWM輸出頻率也更加靈活。
在LED中的套用
在LED控制中PWM作用於電源部分,脈寬調製的脈衝頻率通常大於100Hz,人眼就不會感到閃爍。
新型的APC晶片可以很方便的實現電流信號的隔離檢測,APC晶片首先將電流信號轉換成線性相關的PWM信號,在將PWM信號通過光耦隔離。相對於霍爾方案精度更高,成本更低。
脈衝寬度調製相關專業術語
| 1. | modulation, pulse width ( PWM) 脈衝寬度調製 |
| 2. | pulse-width modulation ( PWM) 脈衝寬度調製 |
優點
PWM的一個優點是從處理器到被控系統信號都是數字形式的,無需進行數模轉換。讓信號保持為數字形式可將噪聲影響降到最小。噪聲只有在強到足以將邏輯1改變為邏輯0或將邏輯0改變為邏輯1時,也才能對數位訊號產生影響。
對噪聲抵抗能力的增強是PWM相對於模擬控制的另外一個優點,而且這也是在某些時候將PWM用於通信的主要原因。從模擬信號轉向PWM可以極大地延長通信距離。在接收端,通過適當的RC或LC網路可以濾除調製高頻方波並將信號還原為模擬形式。
總之,PWM既經濟、節約空間、抗噪性能強,是一種值得廣大工程師在許多設計套用中使用的有效技術。
控制方法
採樣控制理論中有一個重要結論:衝量相等而形狀不同的窄脈衝加在具有慣性的環節上時,其效果基本相同.PWM控制技術就是以該結論為理論基礎,對半導體開關器件的導通和關斷進行控制,使輸出端得到一系列幅值相等而寬度不相等的脈衝,用這些脈衝來代替正弦波或其他所需要的波形.按一定的規則對各脈衝的寬度進行調製,既可改變逆變電路輸出電壓的大小,也可改變輸出頻率.
PWM控制的基本原理很早就已經提出,但是受電力電子器件發展水平的制約,在上世紀80年代以前一直未能實現.直到進入上世紀80年代,隨著全控型電力電子器件的出現和迅速發展,PWM控制技術才真正得到套用.隨著電力電子技術,微電子技術和自動控制技術的發展以及各種新的理論方法,如現代控制理論,非線性系統控制思想的套用,PWM控制技術獲得了空前的發展.到目前為止,已出現了多種PWM控制技術,根據PWM控制技術的特點,到目前為止主要有以下8類方法.
等脈寬PWM法
VVVF(Variable Voltage Variable Frequency)裝置在早期是採用PAM(Pulse Amplitude Modulation)控制技術來實現的,其逆變器部分只能輸出頻率可調的方波電壓而不能調壓.等脈寬PWM法正是為了克服PAM法的這個缺點發展而來的,是PWM法中最為簡單的一種.它是把每一脈衝的寬度均相等的脈衝列作為PWM波,通過改變其周期,達到調頻的效果。改變脈衝的寬度或占空比可以調壓,採用適當控制方法即可使電壓與頻率協調變化. 相對於PAM法,該方法的優點是簡化了電路結構,提高了輸入端的功率因數,但同時也存在輸出電壓中除基波外,還包含較大的諧波分量.
隨機PWM
在上世紀70年代開始至上世紀80年代初,由於當時大功率電晶體主要為雙極性達林頓三極體,載波頻率一般不超過5kHz,電機繞組的電磁噪音及諧波造成的振動引起了人們的關注.為求得改善,隨機PWM方法應運而生.其原理是隨機改變開關頻率使電機電磁噪音近似為限帶白噪聲(線上性頻率坐標系中,各頻率能量分布是均勻的),儘管噪音的總分貝數未變,但以固定開關頻率為特徵的有色噪音強度大大削弱.正因為如此,即使在IGBT已被廣泛套用的今天,對於載波頻率必須限制在較低頻率的場合,隨機PWM仍然有其特殊的價值;另一方面則說明了消除機械和電磁噪音的最佳方法不是盲目地提高工作頻率,隨機PWM技術正是提供了一個分析,解決這種問題的全新思路.
SPWM法
SPWM(Sinusoidal PWM)法是一種比較成熟的,如今使用較廣泛的PWM法.前面提到的採樣控制理論中的一個重要結論:衝量相等而形狀不同的窄脈衝加在具有慣性的環節上時,其效果基本相同的. SPWM法就是以該結論為理論基礎,用脈衝寬度按正弦規律變化而和正弦波等效的PWM波形即SPWM波形控制逆變電路中開關器件的通斷,使其輸出的脈衝電壓的面積與所希望輸出的正弦波在相應區間內的面積相等,通過改變調製波的頻率和幅值則可調節逆變電路輸出電壓的頻率和幅值.該方法的實現有以下幾種方案.
等面積法
該方案實際上就是SPWM法原理的直接闡釋,用同樣數量的等幅而不等寬的矩形脈衝序列代替正弦波,然後計算各脈衝的寬度和間隔,並把這些數據存於微機中,通過查表的方式生成PWM信號控制開關器件的通斷,以達到預期的目的.由於此方法是以SPWM控制的基本原理為出發點,可以準確地計算出各開關器件的通斷時刻,其所得的的波形很接近正弦波,但其存在計算繁瑣,數據占用記憶體大,不能實時控制的缺點.
硬體調製法
硬體調製法是為解決等面積法計算繁瑣的缺點而提出的,其原理就是把所希望的波形作為調製信號,把接受調製的信號作為載波,通過對載波的調製得到所期望的PWM波形.通常採用等腰三角波作為載波,當調製信號波為正弦波時,所得到的就是SPWM波形.其實現方法簡單,可以用模擬電路構成三角波載波和正弦調製波發生電路,用比較器來確定它們的交點,在交點時刻對開關器件的通斷進行控制,就可以生成SPWM波.但是,這種模擬電路結構複雜,難以實現精確的控制.
軟體生成法
由於微機技術的發展使得用軟體生成SPWM波形變得比較容易,因此,軟體生成法也就應運而生.軟體生成法其實就是用軟體來實現調製的方法,其有兩種基本算法,即自然採樣法和規則採樣法.
自然採樣法
以正弦波為調製波,等腰三角波為載波進行比較,在兩個波形的自然交點時刻控制開關器件的通斷,這就是自然採樣法.其優點是所得SPWM波形最接近正弦波,但由於三角波與正弦波交點有任意性,脈衝中心在一個周期內不等距,從而脈寬表達式是一個超越方程,計算繁瑣,難以實時控制.
規則採樣法
規則採樣法是一種套用較廣的工程實用方法,一般採用三角波作為載波.其原理就是用三角波對正弦波進行採樣得到階梯波,再以階梯波與三角波的交點時刻控制開關器件的通斷,從而實現SPWM法.當三角波只在其頂點(或底點)位置對正弦波進行採樣時,由階梯波與三角波的交點所確定的脈寬,在一個載波周期(即採樣周期)內的位置是對稱的,這種方法稱為對稱規則採樣.當三角波既在其頂點又在底點時刻對正弦波進行採樣時,由階梯波與三角波的交點所確定的脈寬,在一個載波周期(此時為採樣周期的兩倍)內的位置一般並不對稱,這種方法稱為非對稱規則採樣.
規則採樣法是對自然採樣法的改進,其主要優點就是是計算簡單,便於線上實時運算,其中非對稱規則採樣法因階數多而更接近正弦.其缺點是直流電壓利用率較低,線性控制範圍較小.
以上兩種方法均只適用於同步調製方式中.
低次諧波消去法
低次諧波消去法是以消去PWM波形中某些主要的低次諧波為目的的方法.其原理是對輸出電壓波形按傅氏級數展開,表示為u(ωt)=ansinnωt,首先確定基波分量a1的值,再令兩個不同的an=0,就可以建立三個方程,聯立求解得a1,a2及a3,這樣就可以消去兩個頻率的諧波.
該方法雖然可以很好地消除所指定的低次諧波,但是,剩餘未消去的較低次諧波的幅值可能會相當大,而且同樣存在計算複雜的缺點.該方法同樣只適用於同步調製方式中.
梯形波與三角波比較法
前面所介紹的各種方法主要是以輸出波形儘量接近正弦波為目的,從而忽視了直流電壓的利用率,如SPWM法,其直流電壓利用率僅為86.6%.因此,為了提高直流電壓利用率,提出了一種新的方法--梯形波與三角波比較法.該方法是採用梯形波作為調製信號,三角波為載波,且使兩波幅值相等,以兩波的交點時刻控制開關器件的通斷實現PWM控制.
由於當梯形波幅值和三角波幅值相等時,其所含的基波分量幅值已超過了三角波幅值,從而可以有效地提高直流電壓利用率.但由於梯形波本身含有低次諧波,所以輸出波形中含有5次,7次等低次諧波.
線電壓控制PWM
前面所介紹的各種PWM控制方法用於三相逆變電路時,都是對三相輸出相電壓分別進行控制的,使其輸出接近正弦波,但是,對於像三相異步電動機這樣的三相無中線對稱負載,逆變器輸出不必追求相電壓接近正弦,而可著眼於使線電壓趨於正弦.因此,提出了線電壓控制PWM,主要有以下兩種方法.
馬鞍形波與三角波比較法
馬鞍形波與三角波比較法也就是諧波注入PWM方式(HIPWM),其原理是在正弦波中加入一定比例的三次諧波,調製信號便呈現出馬鞍形,而且幅值明顯降低,於是在調製信號的幅值不超過載波幅值的情況下,可以使基波幅值超過三角波幅值,提高了直流電壓利用率.在三相無中線系統中,由於三次諧波電流無通路,所以三個線電壓和線電流中均不含三次諧波.
除了可以注入三次諧波以外,還可以注入其他3倍頻於正弦波信號的其他波形,這些信號都不會影響線
電壓.這是因為,經過PWM調製後逆變電路輸出的相電壓也必然包含相應的3倍頻於正弦波信號的諧波,但在合成線電壓時,各相電壓中的這些諧波將互相抵消,從而使線電壓仍為正弦波.
單元脈寬調製法
因為,三相對稱線電壓有Uuv+Uvw+Uwu=0的關係,所以,某一線電壓任何時刻都等於另外兩個線電壓負值之和.如今把一個周期等分為6個區間,每區間60°,對於某一線電壓例如Uuv,半個周期兩邊60°區間用Uuv本身表示,中間60°區間用-(Uvw+Uwu)表示,當將Uvw和Uwu作同樣處理時,就可以得到三相線電壓波形只有半周內兩邊60°區間的兩種波形形狀,並且有正有負.把這樣的電壓波形作為脈寬調製的參考信號,載波仍用三角波,並把各區間的曲線用直線近似(實踐表明,這樣做引起的誤差不大,完全可行),就可以得到線電壓的脈衝波形,該波形是完全對稱,且規律性很強,負半周是正半周相應脈衝列的反相,因此,只要半個周期兩邊60°區間的脈衝列一經確定,線電壓的調製脈衝波形就唯一地確定了.這個脈衝並不是開關器件的驅動脈衝信號,但由於已知三相線電壓的脈衝工作模式,就可以確定開關器件的驅動脈衝信號了.
該方法不僅能抑制較多的低次諧波,還可減小開關損耗和加寬線性控制區,同時還能帶來用微機控制的方便,但該方法只適用於異步電動機,套用範圍較小.
電流控制PWM
電流控制PWM的基本思想是把希望輸出的電流波形作為指令信號,把實際的電流波形作為反饋信號,通過兩者瞬時值的比較來決定各開關器件的通斷,使實際輸出隨指令信號的改變而改變.其實現方案主要有以下3種.
滯環比較法
這是一種帶反饋的PWM控制方式,即每相電流反饋回來與電流給定值經滯環比較器,得出相應橋臂開關器件的開關狀態,使得實際電流跟蹤給定電流的變化.該方法的優點是電路簡單,動態性能好,輸出電壓不含特定頻率的諧波分量.其缺點是開關頻率不固定造成較為嚴重的噪音,和其他方法相比,在同一開關頻率下輸出電流中所含的諧波較多.
三角波比較法
該方法與SPWM法中的三角波比較方式不同,這裡是把指令電流與實際輸出電流進行比較,求出偏差電流,通過放大器放大後再和三角波進行比較,產生PWM波.此時開關頻率一定,因而克服了滯環比較法頻率不固定的缺點.但是,這種方式電流回響不如滯環比較法快.
預測電流控制法
預測電流控制是在每個調節周期開始時,根據實際電流誤差,負載參數及其它負載變數,來預測電流誤差矢量趨勢,因此,下一個調節周期由PWM產生的電壓矢量必將減小所預測的誤差.該方法的優點是,若給調節器除誤差外更多的信息,則可獲得比較快速,準確的回響.如今,這類調節器的局限性是回響速度及過程模型係數參數的準確性.
空間電壓矢量控制PWM
空間電壓矢量控制PWM(SVPWM)也叫磁通正弦PWM法.它以三相波形整體生成效果為前提,以逼近電機氣隙的理想圓形鏇轉磁場軌跡為目的,用逆變器不同的開關模式所產生的實際磁通去逼近基準圓磁通,由它們的比較結果決定逆變器的開關,形成PWM波形.此法從電動機的角度出發,把逆變器和電機看作一個整體,以內切多邊形逼近圓的方式進行控制,使電機獲得幅值恆定的圓形磁場(正弦磁通).
具體方法又分為磁通開環式和磁通閉環式.磁通開環法用兩個非零矢量和一個零矢量合成一個等效的電壓矢量,若採樣時間足夠小,可合成任意電壓矢量.此法輸出電壓比正弦波調製時提高15%,諧波電流有效值之和接近最小.磁通閉環式引
入磁通反饋,控制磁通的大小和變化的速度.在比較估算磁通和給定磁通後,根據誤差決定產生下一個電壓矢量,形成PWM波形.這種方法克服了磁通開環法的不足,解決了電機低速時,定子電阻影響大的問題,減小了電機的脈動和噪音.但由於未引入轉矩的調節,系統性能沒有得到根本性的改善.
矢量控制PWM
矢量控制也稱磁場定向控制,其原理是將異步電動機在三相坐標系下的定子電流Ia,Ib及Ic,通過三相/二相變換,等效成兩相靜止坐標系下的交流電流Ia1及Ib1,再通過按轉子磁場定向鏇轉變換,等效成同步鏇轉坐標系下的直流電流Im1及It1(Im1相當於直流電動機的勵磁電流;It1相當於與轉矩成正比的電樞電流),然後模仿對直流電動機的控制方法,實現對交流電動機的控制.其實質是將交流電動機等效為直流電動機,分別對速度,磁場兩個分量進行獨立控制.通過控制轉子磁鏈,然後分解定子電流而獲得轉矩和磁場兩個分量,經坐標變換,實現正交或解耦控制.
但是,由於轉子磁鏈難以準確觀測,以及矢量變換的複雜性,使得實際控制效果往往難以達到理論分析的效果,這是矢量控制技術在實踐上的不足.此外.它必須直接或間接地得到轉子磁鏈在空間上的位置才能實現定子電流解耦控制,在這種矢量控制系統中需要配置轉子位置或速度感測器,這顯然給許多套用場合帶來不便.
直接轉矩控制PWM
1985年德國魯爾大學Depenbrock教授首先提出直接轉矩控制理論(Direct Torque Control簡稱DTC).直接轉矩控制與矢量控制不同,它不是通過控制電流,磁鏈等量來間接控制轉矩,而是把轉矩直接作為被控量來控制,它也不需要解耦電機模型,而是在靜止的坐標系中計算電機磁通和轉矩的實際值,然後,經磁鏈和轉矩的Band-Band控制產生PWM信號對逆變器的開關狀態進行最佳控制,從而在很大程度上解決了上述矢量控制的不足,能方便地實現無速度感測器化,有很快的轉矩回響速度和很高的速度及轉矩控制精度,並以新穎的控制思想,簡潔明了的系統結構,優良的動靜態性能得到了迅速發展.
但直接轉矩控制也存在缺點,如逆變器開關頻率的提高有限制.
非線性控制PWM
單周控制法又稱積分復位控制(Integration Reset Control,簡稱IRC),是一種新型非線性控制技術,其基本思想是控制開關占空比,在每個周期使開關變數的平均值與控制參考電壓相等或成一定比例.該技術同時具有調製和控制的雙重性,通過復位開關,積分器,觸發電路,比較器達到跟蹤指令信號的目的.單周控制器由控制器,比較器,積分器及時鐘組成,其中控制器可以是RS觸發器,其控制原理如圖1所示.圖中K可以是任何物理開關,也可是其它可轉化為開關變數形式的抽象信號.
單周控制在控制電路中不需要誤差綜合,它能在一個周期內自動消除穩態,瞬態誤差,使前一周期的誤差不會帶到下一周期.雖然硬體電路較複雜,但其克服了傳統的PWM控制方法的不足,適用於各種脈寬調製軟開關逆變器,具有反應快,開關頻率恆定,魯棒性強等優點,此外,單周控制還能最佳化系統回響,減小畸變和抑制電源干擾,是一種很有前途的控制方法.
諧振軟開關PWM
傳統的PWM逆變電路中,電力電子開關器件硬開關的工作方式,大的開關電壓電流應力以及高的du/dt和di/dt限制了開關器件工作頻率的提高,而高頻化是電力電子主要發展趨勢之一,它能使變換器體積減小,重量減輕,成本下降,性能提高,特別當開關頻率在18kHz以上時,噪聲將已超過人類聽覺範圍,使無噪聲傳動系統成為可能.
諧振軟開關PWM的基本思想是在常規PWM變換器拓撲的基礎上,附加一個諧振網路,諧振網路一般由諧振電感,諧振電容和功率開關組成.開關轉換時,諧振網路工作使電力電子器件在開關點上實現軟開關過程,諧振過程極短,基本不影響PWM技術的實現.從而既保持了PWM技術的特點,又實現了軟開關技術.但由於諧振網路在電路中的存在必然會產生諧振損耗,並使電路受固有問題的影響,從而限制了該方法的套用。
套用領域
PWM控制技術主要套用在電力電子技術行業,具體講,包括風力發電、電機調速、直流供電等領域,由於其四象限變流的特點,可以反饋再生制動的能量,對於如今國家提出的節能減排具有積極意義。
