
背景
自上世紀70年代後期以來,計算機技術的發展和複雜工業過程向現代控制理論提出的需求和挑戰推動了模型預測控制方法的產生、發展及套用。但傳統的模型預測控制算法要比經典的PID控制算法複雜,線上計算量大,從而導致控制的實時性下降,因此模型預測控制的套用一般局限於慢速過程。預測函式控制方法正是在這種背景下、為適應快速控制的要求發展起來的一種新型預測控制算法。
簡介
預測函式控制預測函式控制是應快速過程的需要、基於預測控制原理髮展起來的一種新型的預測控制方法,它是由Richalet及其合作者在MAc基礎上於上世紀80年代中後期提出的,並成功套用於機器人高精度控制。PFC認為,在控制輸入頻譜有限的情況下,控制輸入只能屬於一組與設定軌跡和對象特性有關的特定的函式族,被選定的函式稱為基函式。每一時刻加入的控制輸入被看作是由若干事先選定的基函式組合而成的,通過它們的已知回響合成系統的輸出預報值,在此基礎上通過最佳化求出基函式的線性加權係數,進而算出當前及未來的控制輸入。預測函式控制把控制輸入的結構視為關鍵,可以克服其它預測控制中出現的控制輸入規律不明的問題,同時具有算法簡單、計算量小、跟蹤快速、控制精度高等優點。預測函式控制經過多年的發展,其套用己不僅局限於機器人、軍事等快速控制領域,同時也在軋鋼等慢速控制系統中得到成功套用,並取得了顯著的經濟效益。
基本原理
預測函式控制方法是在預測控制的基礎上發展起來的,因此具有與一般預測控制方法相同的基本原理:預測模型、滾動最佳化、反饋校正。傳統的預測控制算法在通過最佳化過程計算未來的控制作用時,並未注意到控制量的結構性質。PFC則把控制輸入的結構視為關鍵,認為控制量是一組預先選定的基函式的線性組合。基函式的選擇與過程特性和擬跟蹤設定值有關。因此只要求出基函式線性組合的係數,即可得到控制量計算方程。基函式線性組合係數的求解方法是通過在預測時域上選擇一些點(稱為擬合點),使得預測的過程輸出在這些擬合點上最接近於一條趨向擬跟蹤設定值的參考軌跡的相應值而求得。
基函式與模型輸出
 預測函式控制
預測函式控制 在預測函式控制中,把控制輸入規範為確保控制系統輸出滿足參考軌跡的關鍵。把預測函式控制的輸入表示為己知基函式 的線性組合:(式1)
 預測函式控制
預測函式控制  預測函式控制 預測函式控制
預測函式控制 預測函式控制 其中,N為基函式的個數,P為預測時域, 為基函式 在t=iTs ( Ts為採樣周期)時刻的值。
基函式的選擇主要取決於參考軌跡和受控對象的特性,通常可取為階躍、斜坡、拋物線、指數函式,甚至三角函式等形式。當設定值在預測時域內為恆定值或者變化率小於或等於某一閡值時,控制輸入可以採用階躍回響函式,即僅採用一個基函式;當設定值在被控時域內為斜坡形式或者變化率大於某一閡值時,控制變數可以取階躍函式與斜坡函式的加權形式,即採用兩個基函式。
當控制輸入選定為幾個事先選定的基函式的線性組合時,則該輸入引起的輸出變化表現為不同基函式的輸出回響的線性疊加。對已選定的基函式}n,可離線算出其作用下的輸出回響。
 預測函式控制
預測函式控制 預測模型的輸出 可以表示為模型自由輸出與模型受迫輸出:
 預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制 其中, 表示自由回響,由過去時刻的控制量和輸出量決定,而與當前及未來時刻的控制量無關; 表示在新增加控制輸入作用下的強迫輸出回響,可表示為:
 預測函式控制 預測函式控制
預測函式控制 預測函式控制 其中, 為t=iTs時刻對象模型在基函式 作用下的輸出,可通過離線計算得到,從而可有效地減少控制算法的線上計算量。
參考軌跡
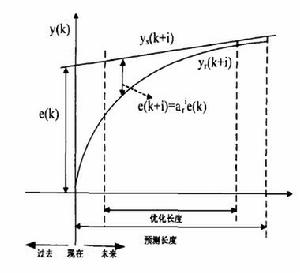 圖1 一階指數參考軌跡
圖1 一階指數參考軌跡 通過最佳化得到的控制量將使模型的輸出值沿著某個期望的軌跡 (即參考軌跡)最終趨近蹤設定值。參考軌跡取決於預測控制的設計者對系統閉環回響的要求,對漸進穩定系統而言,通常選取為一階指數函式,如圖1。
可以得到k+i時刻輸出的參考軌跡為:
 預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制 式中, 為參考軌跡, 為參考軌跡柔化因子, 、 、 、y分別為採樣周期、參考軌跡回響時間、輸出設定值和過程的實際輸出。
預測誤差與反饋校正
在實際情況下,由於模型失配、噪聲等原因,模型輸出與過程實際輸出之間常存在一定誤差,即:
 預測函式控制
預測函式控制 通過校正可更加準確地預測過程的輸出。在預測函式控制中,校正一般可通過預測誤差來對模型輸出進行補償。為提高精度,對於未來k+i時刻誤差的預測,一般可採取基於已知時刻誤差基礎上的多項式擬合法進行估計,它由當前時刻的過程實際輸出值與預測模型輸出的差值和一個修正誤差的自補償器計算,即:
 預測函式控制
預測函式控制  預測函式控制
預測函式控制 自補償器用過去幾個時刻的過程實際輸出值與預測模型輸出值的差值經濾波、擬合而成的一個Ne階多項式(或其它形式)計算,其中 為擬合多項式係數。
有時為簡便起見,可取:
 預測函式控制
預測函式控制 校正後k+i時刻的預測輸出值為:
 預測函式控制
預測函式控制 滾動最佳化
 預測函式控制
預測函式控制  預測函式控制
預測函式控制 在預測函式控制中,最佳化的目標就是要尋找式1中各個基函式的係數 ,使最佳化時域內的預測輸出 儘可能接近參考軌跡。在PFC的線上最佳化算法中,最常用的性能指標是二次型性能指標,即在最佳化時域內取參考軌跡和預測輸出的誤差平方和最小,即:
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制  預測函式控制
預測函式控制 這是一個參數為 的最佳化問題,由此解出 (n=1,…,N)後,即可綜合得到k+i時刻應加入的控制輸入為 。其中,除 可作為實際的控制作用付諸實施外,其餘的量可疊加到對未來控制量的已知假設上,作為下一步計算模型自由輸出的基礎。
基本結構
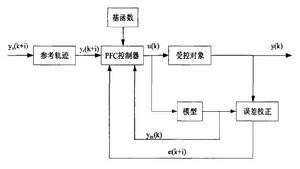 圖2 預測函式控制的基本結構
圖2 預測函式控制的基本結構 預測函式控制的基本結構如圖2。基函式的引入,不但使控制量 的輸人規律性更加明顯,而且由於基函式及其輸出回響均可事先離線計算,線上只需對少量線性加權係數進行參數最佳化,因此,PFC的線上計算量顯著減少,這是它的一個優點。
