
基本概念
非線性系統
所謂非線性系統,指的是系統的狀態與輸出變數在外部條件的影響下,不能用線性關係來描述的系統。系統受到的這種影響是相對於系統輸入的運動特性來說的。由於組成系統的各部件在不同程度上存在非線性的性質,因此在實際生活中,絕對線性的系統是不存在的。為了改善系統的這種非線性性以得到穩定的系統,需要通過設計控制器來研究系統的穩定性,由此產生了相平面法、描述函式法和諧波平衡法等。在過去的幾十年里,對於非線性系統的研究,產生的很多新興的控制理論中,普遍結合了李雅普諾夫穩定性理論,例如以Kokotovic為代表的反推控制理論(Backstepping ) ,以義大利Isidorii教授為代表發展起來的微分幾何控制理論,以Swaroop和Hedrick等人為代表基於反推控制理論發展起來的動態面控制設計方法,以Zade和Mamdani教授為代表發展起來的模糊數學和模糊控制理論。迄今為止,李雅普諾夫方法己經成為研究非線性系統最常用也是最為完善的一種方法,通過構造李雅普諾夫泛函、構造系統控制器來研究非線性系統的穩定性也己取得顯著成效。
奇異系統
奇異系統(singular systems)是一類由微分及代數方程綜合描述的系統,它在結構形式上比僅由純微分方程或差分方程描述的正則系統多了代數方程描述部分。由於研究領域的不同,奇異系統又被不同領域的學者冠以不同的稱呼,例如廣義狀態空間系統、描述系統等等。由於奇異系統描述比正常系統多了代數方程描述部分(快變子系統),因此,奇異系統的適用度比正常系統要廣泛得多。通過系統適當地變換,奇異系統也可以描述成正則系統,但是,許多原有系統的物理特性在變換後有可能會丟失。
最早的奇異系統模型是由學者Ardema在1962年通過研究太空飛行器的動力模型過程中提出的。後來,Rosenbrock在研究複雜的電網系統時,發現電網中某些部件突然失效,在失效的前後時刻有電流的瞬動現象產生,這種瞬間變化的現象不包括在常見正則系統描述之中,在經過大量的研究及實驗後,建立了電網系統的奇異模型。自此以後,廣大研究愛好者對奇異系統展開了廣泛地研究,並且獲得了許多非常有價值的理論成果。由於奇異系統適合於描述規模較大且非常複雜的系統,因此,自上世紀八十年代開始奇異系統被非常廣泛地用於奇異攝動系統、電子網路系統、決策系統、複雜大規模系統等各個領域。隨著廣大學者研究的不斷發展和深入,許多可以由奇異系統描述的實際系統不斷被發現。例如,受限機器人、紐曼模型、Leontief模型、非因果系統、核反應堆等均是典型的奇異系統。
目前,雖然大量的學者在奇異系統相關理論中取得了許多的理論研究成果,但是仍舊有不少的奇異系統理論分析與實際套用上的問題需要研究及解決。例如目前仍然沒有獲得時變奇異系統顯式解等,同時,仍有許多研究成果令人不太滿意,如時變時滯系統的穩定與鎮定等。
數學描述
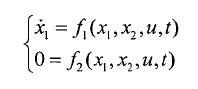
奇異系統也被稱為流形上的微分代數系統、廣義系統、描述系統、廣義狀態空間系統或半狀態空間系統等等。它的一般形式如下:
 非線性奇異系統
非線性奇異系統20世紀70年代,Rosenbrock在討論複雜的電網系統時最先提出了奇異系統的問題。後來,Luenberger發現經濟領域中有些問題也屬於此範疇。在七十年代後期,奇異系統開始得到了廣泛研究,迄今為止有三種典型方法用來研究奇異系統:狀態空間法,幾何方法和多項式矩陣法。狀態空間法是基於奇異系統的狀態方程,用於研究結構性質和設計控制器;幾何方法由Wonham針對線性系統提出,由Lewis將其擴展到解決奇異系統的反饋控制問題;多項式矩陣法是基於傳遞矩陣的某種分解,套用到奇異系統的分析和觀測器的設計上。
近年來,關於奇異系統的研究,己經取得了較大的進展,特別是線上性時不變系統,包括可解性、穩定性、能控性、能觀性、極點配置、觀測器設計、解禍、最優控制、分散控制在內的各種問題已經解決,建立了這相當完備的理論。對於線性時變奇異系統在過去十年也己取得了相當的成就。Cam戶ell和Terrel的研究表明通過解析坐標變換可將線性時變奇異系統轉化為標準正則形。
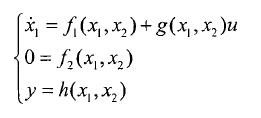
對於非線性奇異系統,還有更特殊的一類稱為仿射的非線性奇異系統,其形式為:
 非線性奇異系統
非線性奇異系統其中x1為狀態向量,x2為代數向量,u為控制輸入,y為量測輸出變數。f1,f2,g,h是適當維數的光滑向量場,且h(0,0)=0, f1(0, 0)=0,f2(0, 0)=0。
此系統的特點是關於控制輸入u為線性的。通過坐標變換和變數分組等,許多系統都能化成上式的形式。
實際套用
人們發現非線性奇異系統有著廣泛的實際套用背景,包括了完全和不完全受限機械系統、電路系統、化工系統等等。
特別是在機器人控制中,更涉及到非線性奇異系統。出現在力與位置控制任務中的運動約束的機器人系統,一個具有末端執行器的機器人,末端執行器必須保持和一個剛性面接觸,在該面上末端執行器的接觸力和位置須同時控制;兩個操作同一物體的機器人,該物體的運動以及施加於該物體上的擠壓力需同時控制;封閉鏈機械臂:行走機器人;利用多手指機器人進行的抓合協調運動等等。一般來說,機器人本身是一個強禍合的多變數控制系統,通常由非線性常微分方程來描述。但是,當機器人執行任務的過程中,常常因終端執行器同對象及環境接觸而產生接觸力。因此對機器人施加某些限制,這些限制通常由非線性代數方程來描述,使機器人的控制模型是一個非線性的微分代數方程,即非線性奇異系統。在機器人控制問題中,受限機器人、移動機器人及機器人的協調控制等都需用非線性奇異系統來描述。
