簡介
多自由度電動機具有機械集成度高、電機結構材料和驅動控制系統元件利用率高等特點,可以大大簡化機械系統的結構,減小體積和重量,從而可以提高系統的精度和動態性能,提高性能價格比,因此在機器人等具有多個運動自由度的系統中具有廣泛的套用前景。
90年代以來,美國、歐洲、日本等國的學者對多自由度電動機的研究工作十分活躍,各種工作原理和不同結構的樣機層出不窮,比較典型的有法國的A. Foggia等人研製的外轉子兩自由度球形感應電動機、美國G . J . V achtsevanos等人研製的三自由度球形感應電動機、美國Kok-Meng Lee等人研製的球形步進電動機、A. R. Miles等人研製的三相自整角原理的兩自由度球形電動機、日本的K. Kaneko等人研製了的三自由度球形直流伺服電動機、日本TOYAMA Shigeki等人研製的兩自由度球形超音波電動機等等。
我國在多自由度電動機方面的研究起步較晚,主要研究成果有西北工業大學的三自由度永磁直流伺服電動機、華中理工大學的三自由度球形交流伺服電動機、浙江大學的組合式兩自由度步進電動機。
從現有資料看,國內外學者所研製的多自由度電動機大都採用球形結構,從結構原理上看球形結構較為合理,易於實現多自由度旋轉運動,但也存在著如結構複雜、加工困難、電磁藕合關係複雜、不易控制等缺點。為此,哈爾濱工業大學在傳統旋轉電機原理和製造工藝基礎上提出了非球形的正交圓柱結構多自由度電動機方案,並在國家863計畫的支持下研製出了正交圓柱結構多兩自由度和三巨由度電動機的樣機,實驗研究證明了該結構的可行性。
電機的結構和工作原理性構
 非球形正交圓柱結構兩自由度電動機
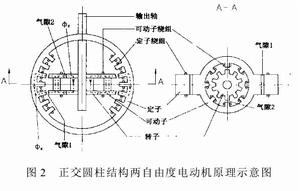
非球形正交圓柱結構兩自由度電動機圖2別是正交圓柱結構兩囪由度電司機的結構分解圖和原理示意圖。從電機的結構分解圖(見圖1)可以看出,該電機由定子、可動子轉子、一對X向軸承、一對可動端蓋、一對Z位軸承、一對Z向端蓋組成。
電機的定子由矽鋼片疊壓製成,內側圓周上續勻布置一些齒和槽,槽內設定兩相定子勵磁繞組電機的轉子由輸出軸和兩段鐵心組成,兩段鐵心士分別均勻布置若干小齒,兩段鐵心相互錯開1/2迭距。電機的可動子由永磁體及其兩側的兩段鐵心紅成,永磁體採用高矯頑力、高磁能積、易於加工鐵硼材料,Z向軸向充磁。由於永磁體的作用可動子外側4個齒呈N, S, S, N規律分布。可司子內側沿圓周分布4對極,每個極上有若干小齒極間槽內設定兩相勵磁繞組。轉子鐵心和可動子鑼心與定子鐵心一樣均由矽鋼片疊壓製成。
可動子外部齒端部及內部齒端部分別加工成協X軸和Z軸為軸線的兩個相互正交的圓柱面,分另i與定子和轉子齒表面形成同心圓柱,從而在定子迭與可動子外部齒之間形成氣隙1,在可動子內部迭與轉子齒之間形成氣隙2,可動子通過螺釘與可司端蓋固聯在一起,可動端蓋又通過X向軸承安翠在定子上,從而可動子與可動端蓋構成的整體可札對於定子繞X軸作有限轉動。電機轉子通過Z向軸承和Z向端蓋與可動子安裝在一起後,可相對於可動子繞Z軸連續轉動。
當定子的兩相繞組按A-B- ( A )- (-B)的順序通電時,小、經永磁體、可動子鐵心、氣隙1、定子鐵心、氣隙1、另一段可動子鐵心回到永磁體形成閉合迴路,電機工作於PM(永磁)電動機狀態,電機的轉子隨可動子相對於定子繞X軸轉動即偏轉。當可動子的兩相繞組按A-B- ( A )- (-B)的順序通電時,小z經永磁體、可動子鐵心、氣隙2、兩段轉子鐵心、氣隙2,另一段可動子鐵心回到永磁體,形成閉合迴路,電機工作於HB(混合式)步進電動機狀態,電機的轉子相對於可動子繞z軸連續轉動即自轉。在電機的定子繞組與可動子的繞組同時按自己的方式通電時,電機的輸出軸同時進行自轉和偏轉,從而實現兩自由度運動。
如果改變電機的支撐結構並在適當的部件上設定輸出軸,可使該電機實現兩個偏轉自由度,從而實現水平側擺和豎直俯仰的兩自由度運動。
電機的性能參數及特點
(1)輸出軸偏轉範圍較大。
(2)力能指標較高,定子繞組電流為1A時,輸出軸的最大偏轉靜轉矩可達30Nm;可動子繞組電流為1A時,輸出軸的最大自轉靜轉矩可達4 0Nm。
(3)採用非球形結構,結構簡單,製造容易。
(4)兩個氣隙共用一個永磁體,一個永磁體、兩組繞組,就實現了兩個轉動自由度,因而體積較小,陛能體積比較高。
(5)採用高性能專用的PWM晶片來實現細分驅動,因而具有較高的定位精度和速度控制精度。
總結
非球形正交圓柱結構兩自由度電動機具有機械系統結構緊湊簡單、集成度高、容易加工製造、電機體積較小、驅動控制系統元件利用率高、易於控制等性能特點,在具有多個運動自由度的機械系統中,一台電機可以代替兩台單自由度電動機,並可提高系統的精度和動態性能,在機器人、多坐標機械加工中心、航天飛行器、電動陀螺儀、全方位跟蹤天線、炮塔轉台、船舶推進系統、人體假肢、醫療器械、全景攝像操作台、球形閥等設備中具有廣泛的套用前景。
