
發展
 離網型風力發電機
離網型風力發電機風力發電可以分為併網型風力發電和離網型風力發電。前者與電網相連,單 機容量較大,現今已發展至單機兆瓦級別;而後者獨立於電網運行,單機容量較小。相比於併網型風力發電系統,離網型風力發電系統具有成本低、套用靈活、維護簡便等優點,故十分適用於牧區、林區、通訊基站、氣象站、海島及邊防哨所等電網無法有效覆蓋的地區。近些年來,隨著全球風力發電產業的快速發展,離網型風力發電系統在上述套用場合發揮了越來越大的作用。根據Global Data2011報告顯示,全球小型風機(離網型占絕大部分份額)在過去五年年均增長率達27%,預計至2020年年均增長率將提高至29.7%。據美國風能協會統計,2011年北美和歐洲的製造商總共生產銷售的小型風力發電機組(離網型占據絕大部分比例)比2010年增長了13.4%。據英國可再生能源協會統計,2009年 英 國 中 小 型 風 電 系 統 ( 離 網 型 占 據 絕 大 部 分 比 例 ) 的 發 電 量 已 達 到35.8GWh,而估計到2020年時英國的小型風電機組總裝機容量可達到1300MW,其年發電量可達到1700GWh。在我國,離網型風力發電產業也取得了驚人的增長。自2003年至2013年,我國離網型風力發電系統的年產量上升了405%,達到了每年100645台。隨著技術的不斷進步,國內生產的離網型風力發電系統早已出口到歐洲、美洲和亞洲的多個國家。
儘管當前離網型風電發展迅速、前景廣闊,但相關的技術研究工作卻相對不足,在提高風能轉化率以及提高發電機系統可靠性這兩個研究層面尚欠深入和完善。由於傳統離網型風力發電系統的特性與風力機的特性並不匹配 , 因而在風速變化時無法自動地實現最大功率點跟蹤(Maximumpower point tracking,MPPT),致使風能利用率較低。現有MPPT技術從電控角度入手,通過變換器等電控裝置控制發電機系統的特性,能夠有效地實現MPPT。然而,電控裝置中含有大量的電子器件,在野外環境中面臨惡劣天氣時,這些電子器件非常容易損壞,進而導致整個發電機系統故障,故基於電控MPPT方法的離網型風力發電系統的可靠性相對較低。因此,研究具有高可靠性的MPPT技術是離網型風電發展的迫切需要。
離網型風力發電機技術的研究現狀
不同類型的離網型風力發電機系統及其套用現狀按所包含的發電機種類不同,離網型風力發電機系統可以被分為三種類型:基於異步發電機的離網型風力發電機系統、基於永磁同步發電機的離網型風力發電機系統和基於開關磁阻發電機的離網型風力發電機系統。
基於異步發電機的離網型風力發電機系統
基於異步發電機的離網型風力發電機系統使用異步發電機作為系統的能量變換裝置。異步發電機可分為籠型異步發電機、繞線型異步發電機和雙饋型異步發電機這三種類型。
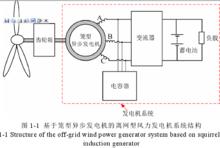
籠型異步發電機具有成本低、可靠性高和具有魯棒性等優點,因此被廣泛套用於傳統離網型風力發電機系統領域。圖1-1顯示了離網型籠型異步發電機系統的結構拓撲圖。然而,籠型異步發電機由於其自身特性,只能單速運行或者採取雙發電機實現雙速運行,無法實現變速運行。因此,籠型異步發電機無法實現MPPT,導致其風能轉化率較低,所以逐漸地被永磁同步發電機系統代替。
圖1-2顯示了繞線式異步發電機系統的拓撲結構。由圖可見,電機轉子外接可變電阻,其工作原理是通過調整轉子迴路的電阻值,從而調節發電機的轉差率,故能實現一定程度的變速運行。雖然該發電機系統比籠型發電機系統的轉速範圍大,但其只能有限地變速運行,從而導致其無法實現MPPT。並且由於結構非常複雜,繞線式異步發電機系統在離網型風力發電領域內沒有得到廣泛的套用。
為了降低系統中功率變換器的容量,雙饋異步發電機系統被廣泛套用於風力發電領域之中。通過控制轉差頻率,雙饋異步發電機系統可以實現雙饋調速,從而在較大的轉速範圍內變速運行,並且能夠方便地實施MPPT控制。然而,雙饋發電機的結構複雜、成本較高,控制方法也非常複雜,因此雙饋異步發電機系統只被套用在併網型大容量風電系統之中,而沒有被套用於離網型風電系統之中。
基於永磁同步發電機的離網型風力發電機系統
永磁同步發電機採用永磁體勵磁,故無勵磁損耗,並且無需換向裝置,因而還具有效率高,壽命長等優點。與同等功率的其他發電機相比,永磁同步發電機在尺寸及重量上僅是它們的1/3或1/5。這些優點使得基於永磁同步發電機的離網型風力發電機系統逐漸代替了其它類型的離網型風力發電機系統,成為了市場上的絕對主流。
系統可以採用的永磁同步發電機的種類較多,按結構可以分為:徑向磁場內轉子電機、徑向磁場外轉子電機、軸向磁場雙定子有槽電機、軸向磁場雙轉子有槽電機和定子平衡單邊軸向磁場電機等多種類型,如圖1-4所示。
對這些類型的永磁發電機進行了分析比較,得到了如下結論:
在相同額定參數條件下,軸向磁場電機的功率密度大於徑向磁場電機;
在不同類型的軸向磁場電機之中,雙邊軸向結構比單邊軸向結構有很大的優勢;
在不同類型的徑向磁場電機之中,外轉子徑向磁場電機比內轉子徑向磁場電機有優勢。
1.在相同額定參數條件下,軸向磁場電機的功率密度大於徑向磁場電機;
2.在不同類型的軸向磁場電機之中,雙邊軸向結構比單邊軸向結構有很大的優勢;
3.在不同類型的徑向磁場電機之中,外轉子徑向磁場電機比內轉子徑向磁場電機有優勢。
雖然徑向磁場內轉子電機在功率密度上落後於其它類型的永磁同步發電機,但其結構最簡單、製造成本最低,非常適合小型離網型風力發電機系統,因此徑向磁場內轉子電機在離網型風力發電領域內獲得了最廣泛的套用。圖1-3顯示了基於永磁同步發電機的離網型風力發電機系統的結構示意圖。由圖1-3 a)可見,傳統永磁同步發電機系統的結構非常簡單,三相交流輸出通過不控整流器轉換為直流輸出,然後給蓄電池和負載供電。該系統可以在較廣的轉速範圍內變速運行,但無法實現MPPT,因此風能利用率不高。為了實現MPPT,各國學者提出改進型永磁同步發電機系統,通過電控裝置對系統進行控制,從而實現MPPT。出於節省成本、簡化結構的考慮,絕大多數系統採用DC/DC變換器進行控制,如圖1-3 b)所示。
基於開關磁阻發電機的離網型風力發電機系統
近些年來,部分學者提出了基於開關磁阻發電機的離網型風力發電機系統。開關磁阻發電機具有結構簡單、過載能力強、動靜態性能好和可靠性高等優點,非常適應風力發電所處的野外環境。然而,開關磁阻發電機系統的控制較為複雜,並且其功率密度小於永磁發電機,因此開關磁阻發電機系統在離網型風力發電領域裡的套用並不廣泛。
MPPT技術的研究現狀
本文提出兩種基於無源自適應MPPT方法的離網型風力發電機系統方案,即高漏電感型發電機(High-leakage-inductance generator,HLIG)系統方案和高主電感型發電機(High-main-inductance generator,HMIG)系統方案。
由上文分析可知,基於永磁同步發電機的離網型風力發電機系統在近些年得到了最廣泛的使用,因此下面以基於永磁同步發電機的離網型風力發電機系統作為論述對象。基於永磁同步發電機的離網型風力發電機系統為了實現MPPT,多數都採用了相同的系統結構[見圖1-3 b)],各種MPPT方法的差異只體現控制策略和算法上。當前MPPT的控制策略主要有四種。
最優葉尖速比控制方法
計算得到風力機的瞬時葉尖速比,將其與風力機的最優葉尖速比進行對比得到誤差量,然後通過控制DC-DC變換器實現MPPT。最優葉尖速比控制方法的原理框圖如圖1-5所示。該種控制方法的原理非常簡單,但其需要使用昂貴的風速測量裝置,從而增加了成本,降低了系統可靠性。由於這些缺點,小功率離網型風力發電機系統很少採用此種控制方法。
功率反饋控制方法
最優葉尖速比控制方法需要使用昂貴的風速測量設備,所以不利於降低成本,於是學者們提出了功率反饋控制方法。由風力機特性可知,風力機的最大輸出功率可以表示為轉速的函式,詳見式(1)。換言之,如果風力機從風中捕捉的功率與風輪轉速滿足式(1),則風力機捕捉到了最大功率,同時發電機系統也輸出了最大功率。由於無法直接測量風力機從風中捕捉的功率,通常將發電機系統的輸出功率作為反饋信號。因此,功率反饋控制方法只需測量風輪轉速,然後根據式(1)和發電機系統的效率特性就可確定發電機系統可以輸出的最大功率,再與此刻發電機系統的瞬時輸出功率進行比較得到誤差信號,進行輸出功率調節控制。通過以上分析可知,功率反饋方法的實質是建立了發電機系統的最大輸出功率和轉速的對應關係。同樣,還可以建立最大輸出轉矩和轉速的對應關係。容易得知,轉矩反饋控制方法的本質與功率反饋控制方法完全相同。圖1-6顯示了功率反饋控制方法的控制原理。
 離網型風力發電機組
離網型風力發電機組(1)
λ——風力機的最佳夜間速比。
相比於最優葉尖速比控制方法,功率反饋控制方法捨棄了風速測量裝置,從而降低了成本。此外,功率反饋控制方法具有較快的回響速度,能夠迅速地跟蹤風速變化。雖然具有以上優點,功率反饋法仍然具有不足之處。功率反饋控制方法需要將風力機的最大功率特性曲線和發電機系統的效率特性曲線提前儲存在控制器儲存單元之中,而這些特性需要從實驗中獲得,因此功率反饋控制方法的可移植性較差。
爬山搜尋控制方法
爬山搜尋控制方法(Hill-climbing searching method, HSC)與前兩種控制方法完全不同,其本質是離散疊代控制,具體的控制方法是:
•當系統處於穩態階段時,給控制量一個微小擾動,然後觀察這一擾動所引起的輸出功率變化;
•若該變化量為正,則繼續施加相同方向的擾動;如果該變化量為負,則改變下一次擾動的方向;
•如此反覆,風力機的工作點將動到最大值附近,並保持一定的波動。
因此,該方法也被稱為觀測擾動控制方法。由此可見,HCS控制方法非常簡單,其不需要使用測量風速裝置,也無需知道風力機的參數特性,因此HCS控制方法具有很好的移植性,這些優點使得HCS制方法成為小型離網型風力發電機系統的首選。
除了這些優點,HCS控制方法也存在著一些缺點。由於HCS控制方法具有盲目性,系統很難快速地跟蹤風速變化,尤其當風力機的轉動慣量較大的時候,這個缺點就會變得十分明顯,因此HCS控制方法只適用於具有較小轉動慣量的離網型風力發電機系統。另外,在實際情況中,風速時刻在不斷變化,很難出現穩態風速的情況,擾動引起的輸出功率變化很可能淹沒在由風速變化所引起的輸出功率變化之中,從而造成搜尋方向錯誤。如圖1-7所示,當風速突然增大時,風力機的特性曲線由藍色曲線變成了褐色曲線,導致功率增大,這讓爬山搜尋法錯誤地將“下山”方向當作了“爬山”方向,造成搜尋方向錯誤。除了上述兩個缺點之外,爬山法還面臨搜尋速度與MPPT效率的權衡問題:如果搜尋步長較大,則搜尋速度較快,但降低了MPPT效率,風力機的工作點圍繞最大功率點做大幅度震盪;如果搜尋步長較短,能夠非常接近MPP點,具有較高的MPPT效率,但搜尋速度較慢,具體見圖1-8。
基於模糊邏輯和基於神經網路的控制方法
除了主流的功率反饋法與HCS控制方法之外,還有部分學者提出了基於模糊邏輯和基於神經網路的控制方法。基於模糊邏輯的MPPT控制方法和基於神經網路的MPPT控制方法具有快速收斂,對參數變化不敏感,可以容納噪聲干擾等優點。
離網型風力發電機普及存在的問題
DFIG 離網運行可對海島地區供電,無需鋪設併網輸電線路,節約遠程燃料運送費用,市場前景廣闊; 但至2015年(論文發表時間)仍未得到推廣套用,究其原因,除供電可靠性較併網型低外,另一個重要原因是DFIG 離網運行,轉子電流用於控制電壓頻率和幅值後,無法實現最大風能捕獲控制,風機利用效率不高,投資價值大為降低。
針對離網型DFIG 組供電可靠性低及不能實現最大風能捕獲問題,澳大利亞M. Aktarujjaman、Nishad Mendis,以及華北電力大學楊京燕等人,採用蓄電池儲能裝置,經DC /DC 變換器與負載側變換器連線,結合下垂控制方法,不但能夠保證定子電壓穩定,而且實現了最大風能捕獲。浙江大學彭思敏等人,分析DFIG 孤島供電系統穩定運行與能量供求平衡機理,採用並聯型儲能系統及分層協調控制策略,保證電壓穩定,實現最大風能捕獲,且能有效降低儲能系統及備用電源的使用頻率。中科院唐西勝等人,建立了包含儲能環節的異步風力發電機微網仿真和試驗平台,因儲能系統的控制作用,微電網可在離網與併網模式間無縫切換,保持良好的電壓和頻率穩定性。太原理工大學李騰飛等人,採用蓄電池和超級電容的混合蓄能裝置,平滑因風速或負載變化引起的功率波動,起到穩定電壓作用,實現最大風能捕獲。印度K. Vijayakumar 等人,在DFIG 離網運行中,將轉子側逆變器和電池儲能系統相連線,以定子電壓和頻率作為反饋控制量控制逆變器,穩定定子電壓和頻率,當風機運行於超同步運行時,多餘電能通過轉子饋送至蓄電池,可實現最大風能捕獲。
綜上所述,對於離網型DFIG 供電系統,已有文獻均採用蓄電池或超級電容等儲能裝置,以負載側變換器控制蓄電池在不同風速情況下的充放電,解決最大風能捕獲問題,同時保證系統不間斷運行,優點較多。但套用蓄電池或超級電容等儲能裝置,存在電池壽命短、維護難度較高,且需要大容量變換器與儲能裝置相連,大幅度提高了系統的硬體裝置成本,使得單位用電成本過高,不宜在大範圍推廣套用。
書籍 離網型風力發電機組
作者
中華人民共和國國家質量監督檢驗檢疫總局
內容簡介
《離網型風力發電機組(第2部分):試驗方法(GB/T 19068.2-2003)》是根據GB/T 1.1—2000《標準化工作導則 第1部分:標準的結構和編寫規則》的要求編寫修訂的。本部分是對JB/T 7323—1994《風力發電機組試驗方法》修訂,並將名稱改為“離網型風力發電機組第2部分:試驗方法”。由於野外試驗的場地對試驗結果影響很大,所以本部分在原JB/T 7323—1994基礎上增加了3.1:試驗場地。本部分的附錄A為規範性附錄,附錄B為資料性附錄。《離網型風力發電機組(第2部分):試驗方法(GB/T 19068.2-2003)》由中國機械工業聯合會提出。本部分由全國風力機械標準化技術委員會歸口。本部分起草單位:內蒙古華德新技術公司。本部分主要起草人:劉金啟。
圖書目錄
前言
引言
1範圍
2規範性引用檔案
3試驗條件
3.1試驗場地
3.1.1風速
3.1.2地形
3.1.3鄰近運行或同時被測機組
3.1.4測試區域內障礙物
3.2試驗樣機
3.3試驗儀器
4試驗方法
4.1空氣動力特性試驗
4.1.1調向性能測量
4.1.2機組切入風速測量
4.1.3風輪空氣動力特性測量
4.1.4風輪機械輸出特性
4.2機組性能試驗
4.2.1功率輸出特性試驗
4.2.2調速特性試驗
4.2.3性能參數
4.3機組功率輸出特性及效率的測算法
4.4制動、保護試驗
4.5噪聲、電磁干擾測定
4.5.1機組噪聲水平
4.5.2電磁干擾測定
5試驗報告格式和內容
附錄A(規範性附錄)風輪轉動慣量的測量和計算
附錄B(資料性附錄)試驗報告格式和內容
