
吸氣式高超聲速飛行器邊界層控制研究
簡介
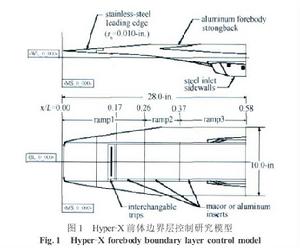 圖1
圖1吸氣式高超聲速飛行器是國外近空間領域高超聲速飛行器發展的重點研究內容,被美國視為未來實現“全球到達,全球作戰”快速反應能力的重要手段。20世紀90年代以來,以美國為代表的已開發國家經過不懈努力,在超燃衝壓發動機為動力的吸氣式高超聲速飛行平台技術上陸續取得重大突破,並相繼進行了地面和飛行試驗。吸氣式高超聲速飛行技術已經從概念和原理探索階段進入了以高超聲速巡航彈、高超聲速飛機、跨大氣層飛行器和空天飛機等為套用背景的先期技術開發驗證階段。吸氣式高超聲速飛行器採用超燃衝壓發動機與機身一體化設計技術,機身前體被設計用來預調將被發動機進氣道吸入的氣流。如此設計的全尺寸吸氣式高超聲速飛行器前體能使氣流在進入進氣道前形成湍流,這有利於減 輕發動機內的流動分離,有利於發動機燃燒。然而,對於風洞模型試驗和縮尺飛行器飛行試驗,較短的飛行器前體長度不太可能在發動機進氣道前自然轉捩形成湍流。
為了能正確地將超燃衝壓發動機風洞和縮尺飛行試驗結果外推到未來的全尺寸飛行器,就需要研究利用邊界層轉捩裝置強迫前體形成湍流流動,研究篩選各種離散粗糙元構型的有效性,使高超聲速邊界層按可控和可預測的方式轉捩,這是縮尺模型飛行試驗必須掌握的技術。同時為了將來套用,還需要研究穩定質量增加(吹氣)邊界層主動控制方法的有效性和可行性。
模型上邊界層主、被動控制構型
美國Hyper-X(X-43A)計畫已成功完成馬赫數7和馬赫數10條件下的飛行試驗。其目的是獲取完全與飛行器機身一體化的自主高超聲速吸氣推進系統的飛行數據,以便驗證和校準用於設計和飛行性能估算的試驗方法、數值方法和分析方法。為了確保計畫成功,許多試驗技術必須達到可接受的成熟水平,其中之一就是在飛行器上建立控制邊界層的有效手段。
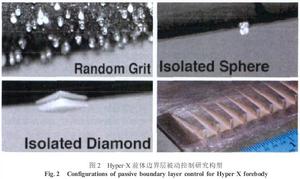 圖2
圖2為了最大程度的減小超燃衝壓發動機對激波誘導流動分離的敏感性,進而減小發動機不啟動的可能性,接近進氣道的邊界層應為湍流。基於目前對高超聲速飛行條件下細長、平面布局形式邊界層轉捩的認識,在Hyper-X的前體估計不會發生自然轉捩,因此需要邊界層控制裝置以確保在飛行條件下進氣道處是湍流邊界層。做為與機身完全一體化的超燃衝壓推進系統的一部分,飛行器迎風面被設計用來壓縮和預處理進入進氣道的氣流。迎風面的前體特徵是薄機頭前緣和3個平斜坡,離散的壓縮角有改善轉捩的趨勢,但其程度不清楚,它為發動機產生系列離散非等熵的流動壓縮。平斜坡外邊是設計用來減小三維效應和流動溢出的鰭。模型的大部分用鋁製造,前緣用不鏽鋼製作,可以拆卸,以便損壞後好更換。可更換的邊界層主、被動控制裝置位置和尺寸是基於模型上當地位置的流動特性確定的(見圖1)。
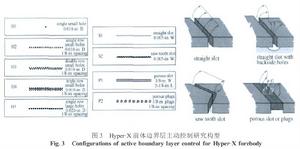 圖3
圖3Hyper-X前體分析採用NASP計畫發展的高超聲速邊界層轉捩準則。美國研究的邊界層被動控制裝置主要有4種形式(圖2):(1)隨機分布粗糙元;(2)離散球體;(3)離散鑽石體;(4)後掠坡狀渦發生器。
聲速射流用於飛行器姿態控制研究已經有多年的歷史了。許多早期的研究認識到這些裝置能夠產生渦並在邊界層中形成轉捩。研究表明,主動吹氣聲速射流對邊界層的控制能力與被動邊界層球控制裝置獲得的結果在很多方面相似。吹氣或質量增加概念被證明能夠在邊界層內產生誘導渦。圖3給出試驗研究的邊界層吹氣主動控制的一些構型,包括各種孔陣列、直槽和鋸齒槽、透氣外掛程式概念。
研究結論
美國NASA蘭利研究中心在20in(馬赫數6)和31in(馬赫數10)風洞進行了縮尺33%Hyper-X前體模型的邊界層調控效率試驗研究。磷熱分布測量技術用於測量模型表面熱傳導圖像和分布,用它來監視各種主、被動邊界層控制裝置轉捩起始位置的移動;油流技術用來獲取模型表面流線信息;邊界層控制裝置及模型產生的詳細激波系分析用紋影技術來完成。邊界層被動調控結果已用於選擇Hyper-X馬赫數7飛行器最終採用的邊界層調控構型及其高度,並已成功進行了飛行試驗。
邊界層主動控制研究篩選了14種吹氣構型,結果顯示所有構型對產生轉捩起始位置移動都是有效的。吹氣壓力比為5時,剛好能確保噴口聲速射流條件;為了將轉捩起始位置移動到邊界層控制裝置附近,從而提供有效的調控,需要40或更高的壓力比;鋸齒槽構型產生有效的轉捩移動需要的吹氣壓力比最小;單排較大孔排列的H4構型是圓孔概念中最好的。試驗研究結果表明用於高超聲速吸氣式飛行器的主動邊界層控制方法是可行的。
邊界層控制技術
大涵道比低壓渦輪葉片通道的雷諾數很低,流場處於層流狀態,相對容易發生邊界層分離,其具體流場參數(葉型負荷分布、雷諾數、來流湍流度等)也決定了是否發生分離/再附、分離點/再附點的位置等。而且大涵道比渦扇發動機低壓渦輪葉片的展弦比一般比較大,在3:1到7:1之間,因此馬蹄渦、角渦、泄漏渦等端區、尖區二次流流動所能影響到的範圍有限,故而二次流損失所占比例較小。在這種情況下,邊界層分離造成的損失成為低壓渦輪內部最重要的流動損失,是影響低壓渦輪氣動效率的主要因素。在低壓渦輪的非定常設計中利用高湍流度與上游尾跡可以誘導邊界層的旁路轉捩,抑制邊界層分離,但其控制效果也受到負荷、雷諾數大小、尾跡頻率等參數的影響,並不能夠完全解決這一問題。作為抑制邊界層流動分離的另一種有效途徑,流動控制技術或獨立作用於低雷諾數高負荷低壓渦輪吸力面邊界層。或與尾跡共同作用,在渦輪部件中起到減小分離損失、實現高負荷渦輪設計的功能。
表面絆線促進轉捩技術
對於逆壓梯度非常大的低雷諾數高負荷渦輪葉片吸力面流場,僅僅依靠非定常尾跡不足以有效抑制邊界層分離。如T106C葉型渦輪葉柵,當雷諾數低至174000時,尾跡逆射流誘導的轉捩有較明顯的延遲,它形成的寂靜區持續時間也較短。如此,則分離泡長度的減小並不明顯,邊界層損失的降低量也受到很大限制。在此基礎上設定絆線以施加擾動,則可以明顯縮短轉捩與尾跡之間的延遲。在此情況下,分離泡才被明顯地縮短,邊界層損失明顯降低。此外,絆線提前轉捩,減小邊界層損失的技術可以在相當寬廣的雷諾數範圍內有效。
絆線控制提前轉捩的效果與絆線的高度、形狀密切相關。最佳的絆線高度大約是當地邊界層位移厚度的60%。台階形的絆線比圓形絆線的控制效果更好,而波浪形絆線僅在無尾跡的情況下具有提前轉捩的效果。然而,以提前轉捩為目的的絆線控制方式增加了湍流的濕面積,為了減小湍流邊界層的摩擦損失,應適當使載入位置靠後。
粗糙表面控制轉捩技術
與絆線類似,粗糙的葉片表面也對邊界層流場形成擾動。在低雷諾數高負荷渦輪的吸力面,局部逆壓梯度導致的流動分離、轉捩以及相應的流動損失大小都受到表面粗糙度的影響。J.P.Bons總結表面粗糙度控制邊界層流動分離的相關研究後認為,邊界層流動分離可以通過適當地增加局部表面粗糙度來控制。這種控制既可以通過提前轉捩來實現,也可以僅在層流邊界層流場中發揮作用,即通過增強動量交換而不藉助轉捩來促進分離流場再附。
在試驗研究中,葉片表面粗糙度一般用離散的粗糙元陣列來定量模擬。MariaVera等針對後載入超高負荷渦輪,用計入尾跡非定常作用的葉柵試驗證實了粗糙表面控制葉片吸力面分離,減小邊界層損失的作用。而Stephen K.Roberts等用柔壁模擬渦輪負荷分布,在平板上研究了粗糙元陣列對邊界層流場轉捩先兆、分離泡尺度的控制作用。研究表明,粗糙元陣列雖然不會明顯改變轉捩先兆波的頻率,但卻可以明顯增大先兆波的初始擾動幅值。
