簡介
早期的遠動終端是由一些分立元件構成的電子設備,它所能採集的信息量很少,功能極為簡單。隨著積體電路遠動終端的產生,它所採集的信息量比分立元件式遠動終端有明顯增加,實現的功能也有所增強。直到20世紀80年代初,遠動終端採用了微型計算機,才使其發展到一個嶄新的階段。現代的遠動終端是一個以微型計算機為核心的具有多輸入/多輸出通道、功能較為齊全的計算機系統,系統中的硬體在程式(軟體)的指揮下完成規定的功能。它具有很強的數據處理能力,改變程式比較方便,工作靈活,適應性強。隨著電力系統的迅速發展,對電網的監視和控制要求日益提高。作為採集電網運行數據和執行調度命令的遠動終端,其作用也越來越重要。由遠動終端提供完備可靠的實時數據,並正確執行控制和調節命令,是實現對電力系統安全、可靠、經濟運行的必不可少的手段之一。
總之,RTU技術近20年來得到了迅速發展,從繼電器邏輯、積體電路到今天的微機遠動裝置,從單CPU的集中式遠動終端到多CPU的分散式遠動終端,從直流採樣到交流採樣等都代表了當今科學技術的進步。
遠動終端單元RTU的功能
遠方終端RTU(也常稱為遠動終端)是電網調度自動化系統基礎設備,它們安裝於各變電站或發電廠內,是電網調度自動化系統在基層的“耳目”和“手腳”。RTU採集所在發電廠或變電站表征電力系統運行狀態的模擬量、狀態量等,監視並向調度主站傳送這些量,執行調度主站發往所在發電廠或變電站的控制和調節命令。
1.四遙
(1)遙測(Tele-measurement,YC):即遠程測量。採集發電廠、變電站的各種運行參數,將採集到的主要參數按規約傳送給調度主站。通常,一台RTU可以處理幾百個遙測量。
(2)遙信(Tele-indication,YX):即遠程信號。採集發電廠、變電站的設備狀態信號,將採集到的主要參數按規約傳送給調度主站。這些狀態信號包括:斷路器和隔離開關的合閘或分閘狀態、主要設備的保護繼電器動作狀態、自動裝置的動作狀態;一些運行狀態信號,發電機組開或停的狀態信號、遠動及通信設備的運行狀態信號等。通常,一台RTU可以處理幾百~幾千個遙信量。
(3)遙控(Tele-command,YK):即遠程命令。根據接收到的調度命令,執行改變運行設備狀態的命令,如發電機組的啟停命令、斷路器的分合命令、並聯電容器和電抗器的投切命令等。通常,一台RTU可以實現對幾十個設備的遠方操作。
(4)遙調(Tele-adjusting,YT):即遠程調節。根據接收到的調度命令,執行改變運行設備參數的命令,如改變發電機有功出力和勵磁電流的設定值,改變變壓器分接頭的位置等。通常,一台RTU可以實現對幾個或十幾個設備的遠方調節。
2.數據通信
按預定通信規約的規定,自動循環(或按調度端要求)地向調度端傳送所採集的本廠站數據,並接收調度端下達的各種命令。
3.其他功能
就地功能:就地功能是指RTU通過自身或連線的顯示、記錄設備,就地實現對電網的監視和控制的能力。對有人值班的較大站點,如果配有監視器、印表機等,可完成顯示、報表、列印功能,越限告警功能,事件順序記錄功能,對時功能,轉發功能等。
自診斷功能:該功能反映了裝置的可維護能力。程式出錯當機時自行恢復功能,自動監視主、備通信信道及切換功能,個別外掛程式損壞診斷報告等功能。
遠動終端單元的結構
1.單CPU的結構
 圖1單CPU結構的RTU基本構成框圖
圖1單CPU結構的RTU基本構成框圖早期的微機化遠動終端多為單CPU結構,即所有的數據處理由一個CPU完成,它負責管理其他各模組,各種功能的擴展,如模擬量採集、開關量採集通過輸入/輸出口實現。圖1是單CPU結構的RTU硬體基本構成框圖。
RTU的工作程式和某些固定參數存放在唯讀存儲器,遙測、遙信等數據暫存於隨機存儲器。模擬量輸入(通道)等各模組都通過各自的接口電路與匯流排連線。螢幕顯示器(監視器)、印表機等人機聯繫設備也通過接口電路與匯流排相連。MODEM是數據機,按通信規約編碼組幀後的信息經MODEM送上通信信道,與主站進行遠程數據通信。
RTU是實時監控系統中的一個組成部分,顯然,RTU運行的軟體是實時軟體。實時性軟體要完成的任務由定時或不定時觸發產生,可用中斷服務程式來完成。因此,單CPU的RTU軟體包括一個主程式和多箇中斷服務程式。主程式完成對整個系統的初始化和人機聯繫的功能。中斷服務程式完成RTU的輸入和輸出功能,主要包括實時時鐘中斷服務程式、A/D結束中斷服務程式、位元組傳送空中斷服務程式和位元組接收滿中斷服務程式等。
2.多CPU的結構
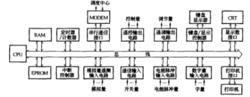 圖2多CPU結構的RTU基本框圖
圖2多CPU結構的RTU基本框圖較大廠站採集和處理數據較多,單CPU結構難以勝任,此時可採用圖2所示的多CPU結構的RTU基本框圖。所謂多CPU是指多個CPU分工協作共同完成RTU功能的一種RTU。
這種RTU由一個主控系統和多個子系統組成,主控系統和每個子系統都帶有CPU。子系統中的CPU負責子系統範圍內的數據採集或執行命令,並與主控系統的CPU通信;主控系統的CPU負責管理各子系統,並與主站通信以及人機聯繫。採用多個CPU構成RTU,有利於提高RTU採集和處理遠動信息的能力。
每個子系統中的CPU運行相應子系統的軟體,這些軟體都包括一個主程式和一個或多箇中斷服務程式。主控系統的CPU軟體主要包括與子系統內CPU的通信程式、與主站的通信程式、數據處理程式以及人機聯繫程式。多個從CPU運行各自的程式,主、從CPU協調工作,共同完成RTU功能所指定的任務。
3.中斷與中斷優先權
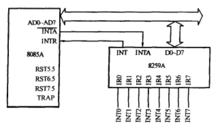 圖3 8085A的中斷擴展
圖3 8085A的中斷擴展由於RTU的任務對實時性要求較強,所以RTU的任務大多數採用中斷方式完成。因此,RTU在實時運行中可以出現多箇中斷源,故需採用一片8259A來擴展中斷輸入,使整個系統可擴展到12級中斷服務。8085A的中斷擴展如圖3所示。
8085A中的五條中斷輸入線,其優先權別是不相同的。TRAP中斷是不可禁止的,這是級別最高的中斷,它用來處理掉電等最為緊急的事故。RST5.5、RST6.5、RST7.5中斷可用SIM指令禁止。SIM指令是一條中斷禁止置數指令,它把累加器數據中的禁止標誌置“1”或“0”,從而決定該禁止標誌位所相應的中斷請求是否允許。累加器數據中的位0、位1和位2分別相應於RST5.5、RST6.5、RST7.5中斷請求的禁止標誌位,它用RIM指令讀入。INTI用來使CPU接受一條由外部電路送到數據匯流排上的RST指令,並根據該指令轉移到相應8箇中斷服務程式入口之一。INTR也可受8259A的控制,從而直接產生一條調用子程式的CALL指令。CALL指令調用的地址是16位的,經過程式預先安排,它可以指向系統存儲器中任一地址的中斷處理子程式的入口。8085A中五條中斷輸入級的優先權及轉移地址如圖4所示。
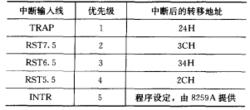 圖4 8085A中中斷優先權及轉移地址
圖4 8085A中中斷優先權及轉移地址