
PID控制原理
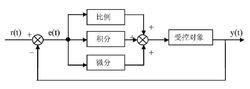 圖1 PID控制系統原理框圖
圖1 PID控制系統原理框圖 PID控制算法由於其原理簡單、實現容易、控制性能良好的特點在現代工業的各個領域都己經得到了廣泛的套用。PID控制經歷多年的理論發展和工程檢驗,己經是一種極為成熟的控制算法,它的算法和結構簡單,並且不需要事先知道控制對象的數學模型,所以在具有複雜模型的工業控制現場,有著十分重要的作用。
PID控制系統原理框圖如圖1所示,系統由模擬PID控制器和被控對像組成。控制器由比例環節(P)、積分環節(I)、微分環節(D)三個部分構成,它的算法公式為:
 變參數PID控制
變參數PID控制 式中,e(t)為輸入的誤差信號,Kp為比例係數,Ti為積分時間常數,Td為微分時間常數,u(t)為控制器輸出 。
對於數字PID控制器,可表示為增量式PID控制式:
 變參數PID控制
變參數PID控制  變參數PID控制
變參數PID控制 式中,Kp、Ki和Kd分別為比例、積分和微分係數,其中,Ki=Kp/Ti,Kd=Kp*Td 。
比例環節
即時成比例地反映控制系統的偏差信號e(t),偏差一旦產生控制器立即產生控制作用,以減少偏差。比例部分與偏差信號在時間上是一致的,只要偏差一出現,比例部分就能及時地產生與偏差成正比例的調節作用,具有調節及時的特點。比例係數越大,比例調節作用越強,系統的穩態精度越高;但對於大多數系統,比例係數過大會使系統的輸出量震盪加劇,穩定性降低。
積分環節
積分作用與當前偏差的大小和偏差的歷史情況有關係,只要偏差不為零,控制器的輸出就會因積分作用而不斷變化,一直到偏差消失,系統處於穩定狀態時,積分部分才不再變化,因此積分作用主要是用於消除靜差,提高系統的控制精度的。但是積分作用的動作緩慢,可能給系統穩定性帶來不良影響,因此很少單獨使用。積分時間常數增大時,積分作用減弱,系統地動態性能穩定性可能有所改善,但是消除誤差的速度減慢。
微分環節
根據偏差變化的速度,微分部分提前給出較大的調節作用。微分部分反映偏差信號的變化趨勢變化速率,並能在偏差信號變化得太大之前,在系統中引入一個有效地早期修正信號,從而加快系統的動作速度,減小調節時間。它比比例調節更為及時,所以微分具有超前和預測的特點。微分時間常數增大時,超調量減小,動態性能得到改善,但是抑制高頻干擾的能力下降。如果過大,系統輸入量可能出現較高的震盪 。
變參數PID控制簡介
在實際控制系統中,常規PID控制總是最容易被採用的,但是對於大時滯時變系統來說,常規PID控制忽略了這樣一個事實;控制作用必須經歷較大的滯後才能在被控變數上得到體現,致使當被控變數的反饋反映出控制作用時,往往會輸入過多的控制量,導致系統嚴重超調甚至失穩;而系統的時變性又會對常規PID控制器的魯棒性能提出了過高的要求,因此在一些具有時變性的大時滯對象中,採用常規PID控制是不適宜的。
 變參數PID控制的結構圖
變參數PID控制的結構圖  變參數PID控制
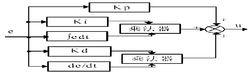
變參數PID控制 工業生產過程中,任何一種控制策略通常都包含三種控制要素:一般控制、加速制動控制和消除余差,實現系統的有效控制必須建立在對上述要素有機結合的基礎之上。對於PID控制來說,上述三種要素可以視作分別由比例作用、微分作用和積分作用實現,而這三種控制的作用時間和作用效果是與控制對象的偏差e、偏差變化速度e′和偏差加速度e''緊密相關聯的。從增量式PID控制式中可以看出,影響每一步輸出改變值的大小是與e、e′、e''相關的,而且e主要是通過積分係數Ki來起作用,e′主要是通過比例係數Kp來起作用,e''主要是通過微分係數Kd來起作用。反過來說,在一個連續控制過程的不同階段,需要根據目標e、e′或e''來判斷控制對象的變化趨勢,並有目的地施加不同的控制要素,投入不同控制組合。也就是說,首先要解決PID控制的組合問題,其次才是參數的大小問題。
變參數PID控制的結構圖如圖2所示 。
變參數PID控制的基本特徵模式
變參數PID控制的特徵空間由e, e'和e“組成,值得提出的是e“也為表征回響特性的重要特徵參數之一,三者可組成8種共4組基本的特徵模式:
 變參數PID控制
變參數PID控制  變參數PID控制
變參數PID控制  變參數PID控制
變參數PID控制  變參數PID控制
變參數PID控制 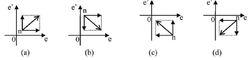 圖3相平面運動軌跡示意圖
圖3相平面運動軌跡示意圖 其中,m11 、m21、 m31和m41四種基本特徵模式的相平面運動軌跡示意圖分別如圖3中的(a) , (b) , (c)和(d)所示,其對應的控制變數偏差變化過程如圖4所示。其餘模式(對應e
