
簡介
連續波雷達是連續發射電磁波的雷達發射信號是非調製的、多頻率的或頻率經過調製的。非調製(單一頻率)連續波雷達通過測量運動物體的都卜勒頻移來計算物體的運動速度,能對相當距離範圍內的具有任何速度的目標進行測速。非調製連續波雷達對目標只能測忠不能測距。不過可行適當的調製載波來同時得到目標的距離和速度信息,即適當調製信號的頻率和相佐並經過對回波的數位訊號處理來獲得距離和速度信息。調製連續波雷達都能測距,多頻連續波雷達還可W區分出活動目驚和靜止目標。調頻連續波雷達能測量活動目標的距離和速度信息。連續波雷達主要用於測高、近炸引信、都卜勒導航、目標搜尋跟蹤和識別、交通管制、戰場監視、飛彈制導等方面。連續波體制霄達發射功率在一段時間內分配比較平均,功率不隨時間明顯變化。連續波雷達的發射頻譜窄,電路簡單;峰值功率小,更容易和簡單的固態發射機兼容。由於連續波雷達不停的發射和接收電磁波,除了幾乎無距離盲區的優點,同時也帶來了發射電磁波直接泄漏到接收端造成的干擾和發射機本振信號直接泄漏到接收化的低噪聲放大器或放大鏈路上的這些缺陷,會造成有源器件提前飽和,混頻損耗增大,放大器增益降低 。
FMCW雷達的信號調製主要包括三角波調製、鋸齒波調製、正弦波調製等幾種不同的方式。由於正弦波調製檢測物體時需要調節信號頻偏,大多套用於只有一個探測目標的情況,比如高度計。FMCW雷達需要檢測距離和速度等信息,而且通常希望檢測多個目標,所以大多採用三角波調製和鋸齒波調製。鋸齒波調製主要用來測量物體的距離,而三角波調製可以同時得到物體的距離和速度信息 。
發展歷史
早在上世紀二十年代,人們己經開始使用FMCW雷達,當時Appleton和Barnett用調頻連續波雷達進行大氣電離層高度的測量實驗。但由於其本身的一些局限,如很難做到收發隔離,這樣就限制了雷達的發射功率不能太高,所以測量距離不像脈衝雷達那樣可以達到幾百公里或者上千公里。另外,模擬窄帶濾波器組的使用也使得設備的規模非常龐大,在工程上使用價值不大。所以,之後相當長的一段時間內,FMCW雷達並沒有得到人們的廣泛關注,而僅僅局限於一些特定場合,如高度計等,相關理論上的一些難題沒有得到深入的研究。
直到上世紀八十年代中期,荷蘭的L.P.Lighthart等人在套用FMC W雷達進行氣象方面的實驗時,才對FMCW雷達的分辨力、模糊函式、接收機靈敏度等相關理論進行了詳細的分析。1985年,美國的RB. Chadwick等人對FMCW雷達的距離速度禍合和旁瓣效應進行了深入研究。與此同時,國內外的學者對FMCW雷達中的一系列關鍵理論問題的研究逐漸展開。
到了九十年代,隨著微波毫米波固態器件和數位訊號處理器的高速發展,FMCW雷達也實現了重大的技術突破,可以實現調頻連續波和毫米波雷達的結合,從而使其兼具調頻連續波的優點及毫米波集成技術的優勢,使得FMCW雷達的成本大幅下降,體積更小、重量更輕。
近年來,FMCW雷達的套用獲得了很大的發展,也越來越多地被用到道路車輛監測記錄系統、汽車防撞雷達、車流量檢測器、自動駕駛等民用領域。1999年,賓士汽車公司在其生產的S級高級轎車上率先採用了77GHz自適應巡航控制系統(ACC)。此後,越來越多的公司和供應商投入到汽車雷達系統的研製、器件開發和算法研究當中。2004年,富士通天公司研發了一款24GHz雷達,這款產品被安裝在帶有入侵感測器的自動報警器上,並被豐田的“皇冠”汽車所採用。隨後,三菱和日立公司合作開發了一款FMCW車用防撞雷達,它的探測距離為120m。2013年,松下與富士通天均展示出可以檢測出行人的79GHz頻帶毫米波雷達。隨著前段單片微波積體電路(MMIC)和天線PCB板等硬體核心部分技術的不斷成熟,以及信號處理技術的高速發展,小體積、低成本、高性能的FMCW雷達的大規模商用愈發可能。博世(Bosch)、大陸(Continental)、天合(TRW)、德爾福(Delphi)、海拉(Hella )、富士通(Fujitsu-ten)、電裝(Denso)等公司都掌握了FMCW雷達的核心技術,並有成熟的產品套用在市場 。
FMCW雷達系統框架
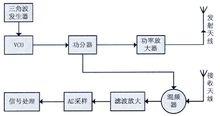 圖1
圖1FMCW雷達的系統框圖如圖1所示,它主要由三部分組成:發射天線和接收天線、功分器禍合器和混頻器組成的射頻前端、三角波發生器以及AD採樣和信號處理的後端處理部分。
三角波發生器提供所需要的調製信號,經VCO控制產生頻率在時間上按三角形變化的連續高頻等幅波,一部分經放大後通過發射天線輻射出去,另一部分作為本振信號。在無線電波遇到目標後返回到接收天線,這時回波信號和本振信號相比頻率產生了變化,經混頻器出來後就是差拍信號。差拍信號的頻率和目標的距離、速度有關,信號處理的主要任務就是提取出差拍信號的頻率,並通過其得到目標真實的距離和速度等信息 。
工作原理
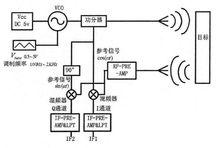 圖2
圖2連續波雷達的調製波有正弦調頻波、三角波、鋸齒波、平方律調頻波等各種調製波。套用最廣泛的是屬於線性調頻連續波(LFMCW)的三角波和鋸齒波。大多數汽車雷達中測距時既可以用鋸齒波也可以用三角波,但如果想要同時測距和測速就需要用三角波才行。如果探測近距離目標(10~20m)時調製頻率採用500Hz~1KHz,探測遠距離目標(30~100m)時調製頻率採用100~300Hz,在理論上調製信號頻率最大不能超過250KHz。
圖2是FMCW雷達系統結構框圖。由VCO輸出一個調頻信號,經功分器分成兩路後,其中的一路信號分流成兩路參考信號,一路參考信號先經90 的移相後進入Q通道的混頻器中,另一路參考信號直接進入I通道的混頻器中;而由功分器分出來另一路信號經發射天線發射出去。回波信號在分別與I、 Q通道中進入混頻器兩路參考信號進行混頻之前,先由單獨的接收天線將其接收到,再經低噪聲放大器放大處理後,然後中頻濾波放大處理得到I、 Q兩通道中的中頻信號 。
優點
調頻連續波(FMCW)雷達是通過對連續波進行頻率調製,根據發射信號和回波信號的頻率差、相位差來獲取目標信息的一種雷達體制。與脈衝體制雷達相比,它具有以下優點:
(1)由雷達理論可知,距離分辨力是由雷達信號的頻寬決定的,FMCW雷達具有較大的頻寬,因此具有較高的距離分辨力。
(2)由於FMCW雷達的回波信號延時遠小於發射信號的時寬,所以雷達發射機和接收機可以同時工作,不存在距離盲區。
(3)在一定噪聲功率條件下,雷達的檢側能力由雷達信號的能量決定。FMCW雷達具有超大的時帶積,遠大於相同信號頻寬和電平的脈衝雷達,所以在相同檢測能力條件下,FMCW雷達發射功率低,不易被截獲。
(4)由於FMCW雷達具有超大的時帶積,所以不需要較高的峰值功率,這樣它的工作電壓就比較低,不需要使用高功率、高電壓器件,從而使得整個系統結構簡單,體積較小、重量較輕、成本較低 。
