一個誤差補償系統至少應具備以下三種功能裝置:
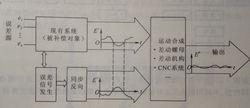 誤差補償系統原理框圖
誤差補償系統原理框圖(1) 誤差信號發生裝置
該裝置用所選定的測量裝置檢測被補償對象的固有誤差圖E -t(見上圖),該圖將作為補償系統中附加誤差的依據。
(2) 信號同步反向裝置
該裝置用於保證附加誤差的輸人與補償對象的固有誤差同步反向,即在任一時刻,這兩個誤差理論上數值相等而相位相差180°,如上圖中的E -t 所示。
(3) 運動合成裝置
運動合成裝置用於實現人為附加誤差運動與系統固有誤差運動的合成,而輸出為兩誤差運動作用抵消後的合成結果,如圖上中的E-所示,使誤差大大降低,達到誤差補償的效果。
