
航空領航
正文
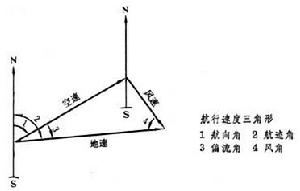
確定飛機的位置,按預定的飛行計畫,準確引導飛機從一個地點到達另一個地點的技術。早期的航空領航主要靠判讀地圖和推測計算的方法。第二次世界大戰以後,隨著飛機速度增大,空中交通量的增長,對領航技術的要求也越來越高。領航不僅要直接提供飛機相對於預定航線的位置信息,而且要提供保持預定航線所需的駕駛信息,因而領航要有精密可靠的領航設備和先進的領航方法。航空領航方法基本可分為推測領航和定位兩類。推測領航 在地圖上從一個已知位置畫出飛機飛行的航跡,沿航跡線標出所飛過的距離確定飛機位置,並向前推算飛向目的地的航向和預計到達目的地的時間。推測領航必須準確地測量飛機相對地面運動的方向和速度。由於飛機在空中飛行受到空氣相對地面運動(風)的影響很大,所以飛機相對地面運動的方向(航跡角)和速度(地速),實際上是飛機相對空氣運動的速度(空速)矢量和空氣相對地面運動的速度(風速)矢量之和,其中飛機相對空氣運動的方向(航向)同相對地面運動的方向(航跡角)之間的夾角稱偏流角,這個關係可用航行速度三角形來表示(見圖)。
 因此在飛行中使用推測領航時,領航員必須根據磁羅盤、空速表和偏流儀測定的航向、空速、偏流和地速等數據進行計算,確定飛機的推測位置。第二次世界大戰以後,隨著現代技術的發展出現了都卜勒導航系統和慣性導航系統。在飛機上使用的都卜勒雷達和慣性平台,與領航計算機(數字計算機或模擬計算器)組成自動地面位置指示系統,使推測領航實現完全自動化。
因此在飛行中使用推測領航時,領航員必須根據磁羅盤、空速表和偏流儀測定的航向、空速、偏流和地速等數據進行計算,確定飛機的推測位置。第二次世界大戰以後,隨著現代技術的發展出現了都卜勒導航系統和慣性導航系統。在飛機上使用的都卜勒雷達和慣性平台,與領航計算機(數字計算機或模擬計算器)組成自動地面位置指示系統,使推測領航實現完全自動化。 都卜勒導航 利用都卜勒雷達和模擬領航計算器組成的推測領航系統進行領航的技術。都卜勒雷達發射電磁波,利用電磁波在發射和接收之間存在相對運動,因而使接收頻率發生變化的原理,自動測量飛機的地速和偏流。除通過偏流地速指示器連續指示飛行中飛機的地速和偏流外,並將地速和偏流信息輸入領航計算器。領航計算器根據地速、偏流和來自飛機航向系統的飛機航向信息進行連續運算,通過顯示裝置顯示飛機相對於預定航線的位置。領航計算器還將飛機的實際航跡與預定航線進行比較,並將得到的偏航信息輸至自動駕駛儀。自動駕駛儀修正航向,操縱飛機沿預定航線飛行。
慣性導航 依靠機上設備測量飛機本身加速度,並根據加速度、速度和位移之間的相互關係計算飛機位置的一種技術。它使用完全自備式,不受外界干擾,並且在所有緯度(包括極區)和各種天氣條件下都可使用的可靠的領航設備。慣性導航系統主要由慣性平台與數字計算機組成,最重要的元件是裝在慣性平台上的兩個互相垂直的水平加速度計。慣性平台依靠陀螺穩定系統跟蹤當地水平,並由計算機提供的陀螺進動信息控制平台,使加速度計的兩個測量軸分別同地理經線和緯線方向保持一致,使兩個加速度計分別測量地理經線方向和緯線方向的兩個加速度分量。數字計算機則根據這兩個加速度分量連續計算飛機的實際航跡、地速、風向、風速和飛機的地理位置及其他領航數據,並對照儲存的預定航線的數據計算出改變航向的指令,自動引導飛機沿預定的航線飛行。
推測領航是各種領航方法的基礎,因為這種方法不僅可以確定飛機位置,而且可推測未來的飛機位置和飛向目的地的航向和飛行時間。但是推測領航的誤差是隨飛行時間而累積的,即使是先進的慣性導航系統,也會因陀螺的漂移而產生領航誤差累積。因此必須用其他領航方法所確定的位置來檢查和更新推測位置。實際上推測領航和其他領航(定位)方法是互相補充的,每一種領航方法以其獨特的定位方法檢查其他方法的準確性。定位總是間斷進行的,在兩次定位之間必須以推測領航為主要方法,如果進行連續定位或定位間隔很短(如每分鐘一次),則可認為是綜合領航。
定位 航空領航有許多定位方法,最常用的是測量各個已知位置的地標或電台的方位或距離,以確定飛機位置線。飛機可以位於這條線上的任何一點。位置線可以是地球表面上的大圓、小圓、雙曲線或其他曲線。兩條不相平行的位置線的交點即為定位點。如果兩條位置線測定的時間不同,則必須把先測得的位置線沿飛行航跡向前移動,移動距離相當於在測定兩條位置線所用的時間內飛機飛行的距離,然後與後測定的位置線相交,得到定位點,這種方法稱為行進定位。在航空領航中的定位方法有三種。
地標定位法 用地圖與地面目標相對照的方法確定飛機對已知地標的方位和距離,從而確定飛機位置。這是簡單、準確的定位方法,但受天氣條件和飛行地區限制較大,高速飛機和高空飛行的飛機是難以依靠觀測地標準確定位的。只有中小型飛機在地面有顯著地標的地區、良好天氣條件下低空飛行時才能實施準確的地標定位法。
天文定位法 通過觀測已知位置的天體(太陽、月球、行星、恆星)的高度角(在水平面上的仰角),確定一等高圈,並用它的一段作為天文位置線;觀測兩個以上天體的高度角,確定兩條以上的天文位置線,其交點即為飛機的位置點。
無線電定位法 測定無線電發射台的方位、距離或距離差,以確定飛機位置線,藉以引導飛機航行(見航空無線電領航)。
參考書目
Myron Kayton, Walter R. Fried, avionics Navigation Systems, New York, London, Sydney, Toronto, 1969.
