
相關概念
1.自適應算法:自適應算法是自適應陷波濾波器的核心內容,以此來控制陷波濾波器的輸出,最終達到最優濾波的目的。面臨自適應算法的選擇問題時,我們首先要了解各種自適應算法的能力和限制;其次要根據套用的需要選擇合適的算法。自適應算法基本上存在兩種不同的推導方法:隨機梯度法和最小二乘估計法。
2.傳遞函式:傳遞函式是經典控制理論的數學模型之一。它不僅可以反映系統輸入輸出之間的動態特性,而且可以反映系統結構和參數對輸出的影響。
簡介
自適應逆控制(Adaptive Inverse Control)是由美國史丹福大學著名教授B.Widrow於1986年首次命名並提出來的,當時在學術界引起了很大反響,為設計控制系統和調節器開闢了新途徑。它是用自適應濾波方法辨識出被控對象的逆模型,串聯到對象的輸入端作為控制器來控制對象的動態特性,所以稱為自適應逆控制。自適應逆控制中的反饋是屬於局部反饋,在自適應疊代過程中只用於改變模型參數,並不直接控制主迴路中的信號流動,更沒有輸出到輸入的閉環,所以它是開環控制。自適應逆控制系統中的動態特性控制和消除擾動控制是分開來各自獨立完成的,互不影響,所以可盡最大可能提高各自的性能。所以自適應逆控制與傳統反饋控制和自適應控制在原理上截然不同。
從自適應逆控制的基本理論和方法來看:自適應逆控制涉及到自適應數位訊號處理和控制兩個學科(交叉),也就是用自適應數位訊號處理的方法來研究未知系統自適應逆控制問題。
從所需要的數學基礎來看:自適應逆控制主要涉及機率、數理統計和矩陣代數等知識;而自適應控制還需要除此之外的一些高深數學,使廣大控制工程師們難以掌握,更難以套用。
從適用範圍來看:對象是穩定的和不穩定的;最小相位的和非最小相位的;線性的和非線性的;單輸入單輸出和多輸入多輸出等系統的控制問題。並能解決自適應控制所不能解決的問題。
基本思想
自適應逆控制的基本思想就是要用一個來自控制器的信號去驅動對象,而該控制器的傳遞函式就是該對象本身傳遞函式的逆。該系統的目的就是要使得對象的輸出跟隨著指令輸入。因為對象一般是未知的,這就要自適應或調節控制器的參數以得到一個真正的對象的逆。按照某一種自適應算法,用對象輸出和指令輸人之差的誤差信號來調節控制器的參數以使該誤差信號的均方誤差最小。
原理
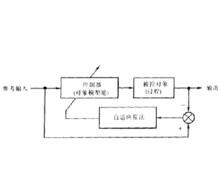 自適應逆控制原理框圖
自適應逆控制原理框圖簡單講,自適應逆控制是利用被控對象傳遞函式的逆作為串聯控制器來對系統的動態特性進行開環控制。或者說,自適應逆控制是要構築一個控制器直接自適應的控制被控對象(過程),而該控制器的傳遞函式就是被控對象本身傳遞函式的逆。其基本結構如右圖所示。
由右圖見,系統控制目的在於使被控對象輸出跟隨參考輸入。但由於被控對象模型一般是未知的,或具有不確定性,因此必須自適應地調節該控制器的參數以便得到一個真正的被控對象的逆。通常是通過某種自適應算法,利用參考輸人與對象輸出之間的誤差信號來凋節控制器參數,使該誤差信號的均方誤差最小。
特點
與傳統反饋控制相比,自適應逆控制採用反饋是為了調整控制器的可變參數,而不是控制系統中的信號流動。在這種情況下,誤差信號用來調整控制器參數,而不是直接反饋到對象輸入。這種方式避免了因信號反饋而可能引起的不穩定問題。除此,自適應逆控制對系統動態特性的控制和對象擾動控制可分成兩個獨立的過程來處理。這樣,可使系統動態性能達到最優的同時,對象擾動影響也可以減少到最小。也就是可以實現兩種控制同時最優。再者,為了使誤差最小,控制器的傳遞函式應該是對象的逆,也就足該對象傳遞函式的倒數。因此,控制器和對象的級聯組合傳遞函式的增益為1。
