背景
大多數慣性穩定平台控制系統套用經典的頻率域迴路成形技術。控制結構以超前滯後或PID加克服機械諧振的陷波器為主,擾動的抑制主要靠反饋迴路的高增益實現。不過,在一些寬頻帶、高精度的穩定和跟蹤系統中,採用經典設計方法很難達到設計指標。
TI公司在20世紀90年代開始套用現代綜合方法設計穩定平台控制器。這些方法基於簡單的一階線性隨機差分方程實時建模和補償符號未知、慢變的非線性庫倫摩擦,套用線性二次型高斯控制(Linear QuadraticUaussian, LQU)控制算法計算反饋增益,取得了較好的控制性能。在後續的工作中,又針對穩定系統中的非線性擾動,採用LQU和Kalman濾波算法對擾動進行實時估計和補償,並採用自校正控制方法提高LQU算法的魯棒性。
除傳統控制方法外,各種先進控制方法如最優控制、前饋控制、神經網路以及模糊控制等也逐漸套用於穩定平台的控制系統,這些控制方法的先決條件是獲得模型的先驗知識。由於傳統的控制系統綜合方法針對典型參數條件設計固定的控制結構,在設計參數出現攝動的情況下會導致控制性能下降。套用最小均方(Least-MeanSquare, LMS)和RLS自適應濾波器的自適應控制系統成為較活躍的研究領域。套用自適應控制可以放寬對模型不確定性和參數變化的要求,使機構設計或感測器的選擇有更大的自由度,更容易達到尖峰控制性能。
簡介
前饋控制
前饋控制是在前蘇聯學者所倡導的不變性原理的基礎上發展而成的。20世紀50年代以後,在工程上,前饋控制系統逐漸得到了廣泛的套用。前饋控制系統是根據擾動或給定值的變化按補償原理來工作的控制系統,其特點是當擾動產生後,被控變數還未變化以前,根據擾動作用的大小進行控制,以補償擾動作用對被控變數的影響。前饋控制系統運用得當,可以使被控變數的擾動消滅在萌芽之中,使被控變數不會因擾動作用或給定值變化而產生偏差,它較之反饋控制能更加及時地進行控制,並且不受系統滯後的影響。
前饋控制發生在實際工作開始之前,是未來導向的。質量控制培訓項目、預測、預算、實時的計算機系統都屬於前饋控制。前饋控制是管理層最渴望採取的控制類型,因為它能避免預期出現的問題,而不必當問題出現時再補救。
就一般而言,管理中採取的控制可以在行動開始之前、進行之中或結束之後進行,稱為三種控制模型。第一種稱為前饋控制或預先控制;第二種稱為同期控制或過程控制;第三種稱為反饋控制或事後控制。
前饋控制是在企業生產經營活動開始之前進行的控制,是一種開環控制。管理過程理論認為,只有當管理者能夠對即將出現的偏差有所覺察並及時預先提出某些措施時,才能進行有效的控制,因此前饋控制具有重要的意義。
前饋控制採用的普遍方式,是利用所能得到的最新信息,進行認真、反覆的預測,把計畫所要達到的目標同預測相比較,並採取措施修改計畫,以使預測與計畫目標相吻合。運用的比較先進的前饋控制技術之一是計畫評審法,或稱網路分析法。它可以預先知道哪些工序的延時會影響到整個工期,在何時會出現何種資源需求高峰,從而採取有效的預防措施與行之有效的管理辦法。
庫存儲備量
在企業管理控制活動中,前饋控制的內容包括對人力資源、原材料、資金等的前饋控制。比如,人力資源必須適應任務要求,數量和素質方面有能力完成指派的任務,並控制機構臃腫,人浮於事的現象,利用統計抽樣來控制原料質量,根據抽樣不合格率決定接受或退貨,根據庫存理論控制庫存儲備量等。
流程工業中的前饋控制基本原理:測量進入過程的干擾量(包括外界干擾和設定值變化),並根據干擾的測量值產生合適的控制作用來改變控制量,使控制維持在設定值上。下圖為換熱器的前饋控制
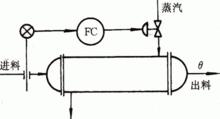 圖1
圖1自適應前饋控制系統
單純的前饋控制是開環的,是按擾動進行補償的,因此根據一種擾動設定的前饋控制就只能克服這一擾動對被控變數的影響,而對於其他擾動對被控變數的影響,由於這個前饋控制器無法感受到,也就無能為力了。所以在實際工業過程中單獨使用前饋控制很難達到工藝要求,因此為了克服其他擾動對被控變數的影響,就必須將前饋控制和反饋控制結合起來,構成前饋反饋控制系統。
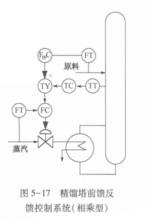 圖2
圖2前饋反饋控制系統有兩種結構形式,一種是前饋控制作用與反饋控制作用相乘,如上圖所示的精餾塔出口溫度的進料前饋反饋控制系統;另一種是前饋控制作用與反饋控制作用相加,這是前饋反饋控制系統中最典型的結構形式,如下圖所示的加熱爐出口溫度的進料前饋反饋控制系統。
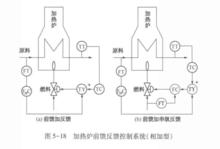 圖3
圖3採用自適應前饋控制系統的條件
採用前饋控制系統的條件是:
1、擾動可測但是不可控。
2、變化頻繁且變化幅度大的擾動。
3、擾動對被控變數的影響顯著,反饋控制難以及時克服,且過程控制精度要求又十分嚴格的情況。
實施
1)對計畫與控制系統作認真深入的分析;
2)建立該系統的物理模型或因果關係分析圖;
3)隨時對上述模型進行補充、修正、完善、使之更符合實際;
4)通過調查、預測,把變化的環境參數輸入模型中,觀查、分析其影響及偏差信息;
5)根據事前的備選方案,結合實際情況,採取相應的糾編措施。
要求
一是要有大量的、準確的、有代表性的信息以便準確預測;
二是要有科學的、經過實踐檢驗的預測模型;
三是要充分了解控制過程並將其透視為“白箱”的能力;
四是要對過程變化高度敏感;
五是保持前饋控制模型的動態特性。這些因素在控制實務上具有一定的難度,因而,前饋控制是有風險的。
設計
穩定迴路控制器可以套用H, H∞和模糊控制等常見的綜合方法設計,針對外部擾動可以套用前饋補償或者擾動觀測的方式比,提高穩定性能。為重點說明前饋控制設計,反饋控制迴路採用經典頻域迴路成型方法設計而忽略提高穩定性能的其它措施。簡化的反饋控制迴路結構如圖所示。
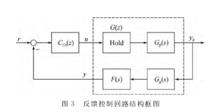 圖4
圖4 自適應前饋控制 自適應前饋控制
自適應前饋控制 自適應前饋控制 自適應前饋控制
自適應前饋控制自適應前饋控制的結構框圖如圖6所示。其中,為有限衝擊回響濾波器實現的前饋補償器,為保證反饋控制迴路具有ShannonBode逆解的延遲環節。算法通過自適應濾波器線上建模反饋控制迴路的逆模型,形成反饋控制迴路的前饋指令。理想情況下,指令r到輸出y具有全通特性,自適應前饋控制與反饋控制迴路構成2自由度控制結構。
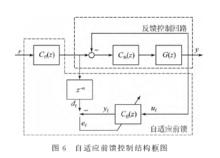 圖5
圖5下圖所示為M階自適應RLS濾波器的結構。
圖6