
基本組成
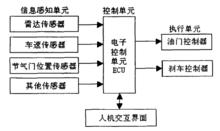 圖1 ACC系統的基本組成
圖1 ACC系統的基本組成汽車自適應巡航控制系統主要由信息感知單元、控制單元、執行單元和人機互動界面構成,其基本組成如圖1所示。
信息感知單元
信息感知單元主要用於向電子控制單元(ECU)提供自適應巡航控制所需的車輛行駛狀況及駕駛員的操作信號。它包括以下幾種感測器:雷達感測器、車速感測器、節氣門位置感測器、制動踏板感測器和離合器踏板感測器等。雷達感測器,安裝在汽車前端,用來獲取車間距離信號;車速感測器,安裝在速器輸出軸上,用於獲取實時車速信號;節氣門位置感測器,安裝在節氣門軸上,用於獲取節氣門開度信號;制動踏板感測器,安裝在制動踏板下,取自製動燈開關信號,用於獲取制動踏板動作信號;離合器踏板感測器,安裝在離合器踏板下,用於獲取離合器踏板動作信號。
控制單元
控制單元以微處理器為核心,包括時鐘電路、復位電路、電源電路、感測器輸入接口電路以及與監控主機進行數據交換的串列通訊接口電路,用於實現系統的控制功能。ECU根據駕駛員所設定的安全車距及巡航行駛速度,結合雷達傳送來的信息確定主車的行駛狀態。當兩車間的距離小於設定的安全距離時,ECU計算實際車距和安全車距之比及相對速度的大小,選擇減速方式,同時通過報警器向駕駛員發出警報,提醒駕駛員採取相應的措施。
執行單元
執行單元包括節氣門執行器和制動執行器,節氣門執行器用於調整節氣門的開度,使車輛作加速、減速及定速行駛;制動執行器用於緊急情況下的剎車。
人機互動界面
人機互動界面用於駕駛員設定系統參數及系統狀態信息的顯示等。駕駛員可通過設定在儀錶盤上的人機互動界面(MMI)啟動或清除ACC控制指令。啟動ACC系統時,要設定主車在巡航狀態下的車速和與目標車輛間的安全距離,否則ACC系統將自動設定為默認值,但所設定的安全距離不可小於設定車速下交通法規所規定的安全距離。
ACC原理
ACC模組為了保持車輛間的距離和速度,根據收到的雷達信息通過 CAN 匯流排向電子液壓控制單元和發動機管理系統發出加速和減速的請求, 當發動機管理系統不能夠完成減速任務時, 就由電子液壓制動系統的自動制動功能來完成,並不需要駕駛員踩制動踏板。在 ACC的自動制動模式中,駕駛員如果踩下制動踏板, ACC模組就會根據制動踏板的位置信息和主缸壓力信息退出正在進行的自動制動模式。 發動機管理系統如果傳遞出駕駛員踩下加速踏板的信息, ACC 模組也會退出自動制動模式。如果發動機管理系統發布的是駕駛員沒有踩加速踏板, 而 ACC系統繼續要求減速, 系統就會再次進行自動制動。 自動制動的目的是平穩地跟隨目標車輛, 並且在需要時能安全平穩地停止下來。 所以制動的平穩性是系統必須考慮的。
ACC工作過程
 圖2 汽車自適應巡航控制系統工作示意圖
圖2 汽車自適應巡航控制系統工作示意圖汽車自適應巡航控制系統工作示意圖如圖2所示。當主車前方無行駛車輛時,主車將處於普通的巡航行駛狀態,ACC系統按照設定的行駛車速對車輛進行勻速控制。當主車前方有目標車輛,且目標車輛的行駛速度小於主車的行駛速度時,ACC系統將控制主車進行減速,確保兩車間的距離為所設定的安全距離。當ACC系統將主車減速至理想的目標值之後採用跟隨控制,與目標車輛以相同的速度行駛。當前方的目標車輛發生移線,或主車移線行駛使得主車前方又無行駛車輛時,ACC系統將對主車進行加速控制,使主車恢復至設定的行駛速度。在恢復行駛速度後,ACC系統又轉入對主車的勻速控制。當駕駛員參與車輛駕駛後,ACC系統將自動退出對車輛的控制。
典型套用場景
 圖3 自適應巡航控制系統的5種典型交通場景
圖3 自適應巡航控制系統的5種典型交通場景在ACC系統的實際套用中,主要包括平穩跟車、前車換道插入、前車換道離開、遠處接近前車以及前車急剎車這5種典型的交通場景,如圖3所示。在現實生活中,實際的交通場景無論多複雜,基本都是由這五種場景組合而成。
ACC系統的間距策略
在汽車ACC系統的信號控制單元中,問距策略決定了行駛過程中採取的安全跟車間距,為後續的ACC控制算法提供參考間距輸入值,是設計ACC控制系統的第一步。過小的間距策略容易引發交通事故,而過大的間距策略不僅損失了道路的交通通行能力,而且容易導致臨近車道車輛的換道插入.可見,間距策略設計的好壞直接決定了行駛過程中的安全性、跟車性以及道路的使用效率等。現有的間距策略主要可以分為兩大類:固定間距策略和可變間距策略。
固定間距策略
固定間距策略就是在行駛的過程中始終保持一個恆定的車間距,而與當前行駛環境無關。這種間距策略結構簡單,計算量少,但對間距值的選擇提出了極大的挑戰,既要兼顧到各種複雜的行駛環境,又要儘可能保證行駛的安全並改善交通流。但是,這種固定的間距策略無法適應一些複雜多變的行駛環境,無法平衡行駛過程中的多個控制目的,在缺乏車車通訊的情況下會導致ACC佇列的不穩定。針對固定間距策略的不足與缺點,研究學者提出了隨著行駛環境而變化的可變間距策略。
可變間距策略
在可變的間距策略中,具有代表性的主要有基於車頭時距的安全間距策略以及仿人間距(HFD)策略。其中,基於車頭時距的間距策略又可分為恆定車頭時距(CTH)策略和可變車頭時距策略。
ACC的作用
(1)通過車距感測器的反饋信號,ACC控制單元可以根據靠近車輛物體的移動速度判斷道路情況,並控制車輛的行駛狀態;通過反饋式加速踏板感知的駕駛者施加在踏板上的力,ACC控制單元可以決定是否執行巡航控制,以減輕駕駛者的疲勞。
(2)自適應巡航控制系統一般在車速大於25 km/h時才會起作用,而當車速降低到25 km/h以下時,就需要駕駛者進行人工控制。通過系統軟體的升級,自適應巡航控制系統可以實現“停車/起步”功能,以應對在城市中行駛時頻繁的停車和起步情況。自適應巡航控制系統的這種擴展功能,可以使汽車在非常低的車速時也能與前車保持設定的距離。當前方車輛起步後,自適應巡航控制系統會提醒駕駛者,駕駛者通過踩油門踏板或按下按鈕發出信號,車輛就可以起步行駛。
(3)自適應巡航控制系統使車輛的編隊行駛更加輕鬆。ACC控制單元可以設定自動跟蹤的車輛,當本車跟隨前車行駛時,ACC控制單元可以將車速調整為與前車相同,同時保持穩定的車距,而且這個距離可以通過轉向盤附近的控制桿上的設定按鈕進行選擇。
