反推
所謂反推,可簡單理解為:最終控制信號通過一系列“虛擬”信號以遞歸的方式得到,虛擬信號事實上無需通過硬體,可直接經由計算得到,故可簡化控制器的結構;遞歸的每一步只需要處理一個相對簡單的誤差系統,從而可較靈活地選擇控制信號,有效改善過渡過程品質。
線性系統反推自適應控制
 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制定常線性系統的反推自適應控制理論研究以Krstic等的著名論文為起點,取得了一些較好的結果。圖1給出了文獻反推自適應方案的基本結構,其中,被控對象相對階為 , 為對象輸出, 為參考模型輸出, 為參考模型輸入,最終控制信號 通過虛擬控制信號及調參律 以遞歸方式一步步得到。事實上,在反推控制律設計中,棘手的是如何處理對虛擬控制信號的微分問題。而文獻的核心,正是巧妙地提出了一種構造Lyapunov函式的方法,避開了對信號的微分。
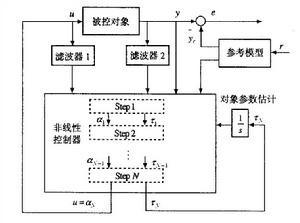 圖1 反推自適應控制
圖1 反推自適應控制由於放棄了確定性等價原則和規範化調參律,文獻所設計的反推自適應控制器較傳統自適應控制器具有如下優點:
 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制(1)可顯著改善系統跟蹤誤差的過渡過程品質,給出了系統跟蹤誤差 性能指標與設計參數間的明確關係;當高頻增益確切已知的情況下,可給出系統跟蹤誤差 性能指標與設計參數間的明確關係,從而為改善跟蹤精度指出了具體途徑。
(2)削弱了調參律對系統的影響。
(3)在無調參律的情況下,反推控制對參數不確定性仍具有一定的魯棒性。
非線性系統反推自適應控制
由於更加貼近工程實際,非線性系統的自適應控制始終是控制理論中最具吸引力的研究方向。自從文獻E33首先就一類非線性系統提出反推自適應控制方案以來,對非線性系統的反推自適應控制研究取得了多方面的進展。
下面介紹 嚴格反饋非線性系統的反推自適應控制方案。
基本的非線性反推方案
設計過程為:考慮參數化嚴格反饋系統
 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制其中, 為狀態, 為控制, 為未知的常參數矢量, 和 為光滑函式且對於任意的 ,
 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制基本思想是採用遞歸方法設計控制器,將某些狀態變數視為“虛擬控制”並設計控制律:首先將上式的第1個等式視為一個獨立的子系統,定義誤差變數 ,虛擬控制 用來穩定第1個等式。由於參數 未知,採用自適應方法來完成該任務,則此時的控制器包含控制律 以及調參律 ;由於 並非最終的實際控制,反推的下一步定義誤差變數 ,虛擬控制 則用來穩定包含第1、第2個等式的子系統。接下來的設計類似,在每一步中產生一新的控制律和新的調參律,最後一個控制信號 則為最終控制 。圖2給出了該方法的大致設計過程。
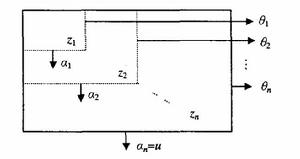 圖2 嚴格反饋非線性系統反推自適應控制
圖2 嚴格反饋非線性系統反推自適應控制上述方案的主要優點在於:
(1)仍然基於Lyapunov方法,但克服了傳統方法“匹配條件”的束縛;
(2)對參數化嚴格反饋非線性系統,解決了全局穩定和跟蹤收斂的難題;
(3)當參數未知時,傳統的反饋線性化設計方法會抵消系統中有用非線性特性,而反推自適應則較為靈活,可通過增加附加非線性項來改善系統過渡過程性能。
調節函式方案
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制 自適應反推控制
自適應反推控制 自適應反推控制
自適應反推控制顯然,上述基本反推自適應方法對同樣的參數 進行了 次估計,文獻採用調節函式方案克服了這種過參數化的缺點。調節函式方案可以視為基本反推自適應方案的更高級形式。以第1步為例,反推一開始,該方案並非將 視為調參律,而僅視為“調節函式”;調節函式 在後面的遞歸設計中將被用到,它與調參律問的誤差 可通過增加控制器的附加項來補償。除繼承了基本反推方案的優點外,調節函式方案還可使自適應控制器的動態階數最小,同時也使狀態和參數估計收斂到的集合的維數最小。
模組設計方案
調節函式方案儘管擁有許多優點,但也存在下述缺點:
(1)調參律設計沒有太大的選擇餘地;
(2)雖然調節函式控制器的階數是最小的,但對於高階系統,由於與辨識器之間的相互作用,控制律的非線性表達變得非常複雜。
為克服上述缺點,文獻還提出了一種模組化設計方案。該方案在反推自適應的基礎上,借用了線性系統設計的一些傳統方法,即令辨識器模組設計和控制器模組設計相互獨立。該文獻首先分析了將線性系統方法引入非線性系統時所遇到的主要障礙:除非對系統非線性特性加以嚴格限制,上述控制器不能實現辨識器和控制器的分離。進而,提出了一類具有較強魯棒性的控制器,即所謂的ISS控制器。該類控制器不僅對常參數誤差,而且對時變參數估計均可保證信號的有界性,從而使ISS控制器能夠適用於模組化的非線性反推自適應設計。此外,它還提出一類SG控制器,採用了類似於線性系統中的小增益性質。SG控制器減少了ISS控制器的非線性複雜性,但同時也降低了其過渡過程性能。
套用研究
航空航天領域
1995年,Richard等人首先討論了飛彈縱向運動控制器的反推控制方案;文獻對某複雜高性能飛機設計了反推自適應飛行控制律並進行了仿真研究,結果表明:即使存在較大的模型誤差,甚至在飛機某個平尾失效的情況下,反推自適應控制律都展現出了快速的收斂性和良好的魯棒性;對飛控系統的反推自適應控制進行了初步研究,比較了不同的飛控設計方法(模糊控制、反推自適應控制、變結構控制、非線性動態逆控制、間接自適應控制等),結果表明,反推方法在未來飛控系統設計中具有突出優點;採用神經網路和反推自適應相結合的方法討論了飛行控制器的設計問題;則討論了反推方法在航空發動機控制等設計中的套用。
其他工業控制領域
除航空航天領域外,在液壓控制、電機控制、機器人控制、船舶控制等許多工業控制領域,反推自適應控制的套用在國內外均有大量報導。
