
基本思想
自校正控制系統是一種把參數的線上辨識與控制器的線上設計有機結合在一起的控制系統,並在設計辨識算法和控制算法時考慮了隨機干擾的影響,因此,屬於隨機自適應控制系統。自校正控制既能完成調節任務,也能承當伺服跟蹤完成控制器的任務。它的基本思想是將參數估計遞推算法與各種不同類型的控制算法結合起來,形成一個能自動校正控制器參數的實時的計算機控制系統。但是只有適當的辨識算法和合適的控制策略的結合才能產生既便於線上實施又具有穩定性的自校正控制算法。因此如何選擇控制策略和辨識算法,如何將其有機地結合起來是自校正控制的關鍵問題之一。
確定性等價原理
自校正控制系統通常屬於隨機適應控制系統,具有確定性等價性質,對於參數自適應的自校正控制系統來說,當所有的未知參數用它們的估計值代替後,其控制規律的形式與對應的參數已知時的隨機最優控制規律的形式等價。因此,在確定自校正控制規律時,可根據確定性等價性質,先假定該系統的所有參數是已知的,並根據給定的性能指標綜合出系統的最優控制規律,然後用估計模型來估計未知參數,並用估計結果代替上述最優控制律中的相應未知參數,就得到了自校正的控制規律。
需要注意的是,第一,確定性等價原理的前提是分離原理,也就是說,首先必須將參數和狀態估計與控制分別考慮,然後才談得上等價與否;第二,確定性等價原理的成立是有條件的,目前已經證明對於白噪聲,可疊加的測量噪聲和二次型性能指標的線性過程確定性等價原理是成立的。對於參數未知的隨機情況,只有當參數是隨機不相關時,確定性等價原理才成立。
自校正控制系統的結構
 自校正控制系統
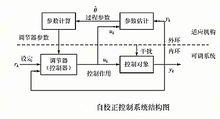
自校正控制系統自校正控制系統是由常規控制系統(內環)和自適應機構(外環)組成的,其中自適應機構包括遞推參數估計器和控制參數計算器,其典型結構圖如右圖所示。
 自校正控制系統
自校正控制系統參數估計器(辨識器)的作用是根據對象的輸入輸出信息,線上估計控制對象的參數θ,並將參數估計值 送到參數計算器。參數計算器則根據估計值計算控制器的參數。控制器再根據參數計算器的結果及事先選定的性能指標綜合出相應的控制作用 u ,使其能送出最優或次優的控制規律,保證系統運行的性能指標達到最優或接近最優狀態。
自校正控制系統 自校正控制系統系統開始運行時,由於參數估計值 與其真值θ的差別可能很大,控制效果可能很差。但隨著過程的進行,參數估計值會越來越精確,控制效果也會越來越好。當控制對象特性發生變化時, 會發生相應的改變,從而使控制器參數也發生相應的變化,自動適應了變化了的對象。因此儘管系統、環境在不斷地變化,由於控制動作根據這些變化不斷辨識,不斷綜合出新的控制率,因而系統具有一定的適應能力,能使性能趨於最優或次優,最終收斂到其參數已知時的最優控制。
自校正控制算法的分類
從自校正控制算法所採用的控制策略來分類,自校正控制系統可以分為基於最優控制策略的自校正控制系統(如最小方差、廣義最小方差自校正控制器),基於經典控制策略的自校正控制系統(如極點配置自校正調節器)和基於最優控制策略與經典控制策略相結合的自校正控制系統(如具有極點配置的廣義自校正控制器)3類。
從自校正控制算法的實現方式來分類,有隱式(直接)算法和顯式(間接)算法自校正控制算法兩類。隱式算法是直接估計控制規律中的未知參數,顯式算法則首先辨識被控系統的參數,然後將其估計值當成參數的真值去計算控制器的參數。在隱式算法中控制參數直接由過程參數估計值加以修改,所以隱式自校正採用的是預測控制原理,並且要求系統的延遲為已知的。在顯式自校正中,過程參數的估計和控制規律的計算是分離的,因而過程參數的估計精度對於計算控制律是十分重要的。顯式自校正是屬於非直接控制的一類,其延遲可作為過程參數的一部分利用遞推參數估計加以確定。隱式算法與顯式算法比較由於省去了控制器設計計算這一步,從而可避免求解矩陣方程,使算法的魯棒性有所提高。但當系統的延時較大時,顯式算法則可減少辨識參數的個數,且容易將保證算法穩定的條件與被控系統的參數聯繫起來。
自校正控制的性能指標
自校正控制技術的性能指標,根據控制對象的性質以及控制的目的和要求,可以有多種不同的結構形式。其中一種是誤差二次型目標函式的形式,自校正控制策略用於保證這個二次型目標函式達到極小值,這種控制策略通常稱為最小方差控制。自校正控制性能指標的另一種形式是在 20 世紀 70 年代中期和後期由Edmunds(1976)、Wellstead(1979)和 Astrom(1980)等人相繼提出的,它不採用指標函式的形式,而是把預期的閉環系統的行為用一組期望傳遞函式的零極點的位置加以規定。自校正控制的策略就是保證實際的閉環系統的零極點收斂於這一組期望的零極點,這樣的控制策略有時稱為零極點配置的控制策略。
