
脈衝相位法聲速計
工作原理
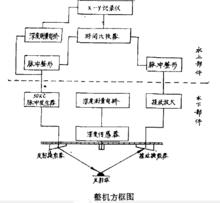 圖1
圖1圖(1)為儀器方框圖(不包括電源部分),脈衝發生器產生一列50kc的電脈衝,加至發射換能器上,使其發射一列重複頻率為50kc的聲脈衝束,經過固定聲程由接收換能器轉變為電信號,經放大,整形得到一列接收脈衝,送至時間比較器。時間比較器輸出的電壓取決於聲在海水中的傳播速度和換能器之間的距離,如果換能器的距離固定不變,則只要測量接收脈衝與發射脈衝的相對時延,即可求得聲速。
脈衝波經過固定聲程D所需的時間為:
 聲速計
聲速計D為聲程長度,C為聲傳播速度;
然而時間T可以用發射頻率的時標表示,即
 聲速計
聲速計 聲速計
聲速計其中T為發射脈衝周期
n為發射脈衝的整數倍
t為扣除脈衝整數倍後餘下的時間,由(1)(2)式得
 聲速計
聲速計對應於不同的聲速為
 聲速計
聲速計 聲速計
聲速計於是
為了使海中聲速變化範圍(1435~1542米/秒)落在一個量程上,擬定該儀器的聲速測量範圍擴展為1432~1545米/秒,
設C'=1432米/秒,對應於t'
C'=1545米/秒,對應於t'
如果發射脈衝的重複頻率為50kc,即T為20μs。必須使t'-t'=T=20μs,從而得出聲程的長度。
 聲速計
聲速計為了使聲速1432米/秒落在記錄紙 x 座標軸的起始端,必須選擇整數倍的n。
由(4)A式得
選取n=14,則儀器聲程D=n·C·T=40.096厘米。
結構設計
為了有效地減少水下部件的體積,克服海流對聲速測量精度的影響,採用字V字形聲程結構,發射和接收換能器均採用頻率相同的1.5MC的鋯鈦酸鉛陶瓷壓電晶體,從而提高接收的靈敏度,使接收放大器的電路更為簡單,換能器的裝配是用一根銅棒的端面和晶片的內平面硬接觸,並作為換能器的引線,使晶片能在200米深的海水壓力作用下,不至於發生位移或破裂。
為了便於維護和長時間的測量,擬定把水下部件的電源設定在水面讀數裝置,採用四芯電纜傳輸,其分配為,一芯傳輸發射脈衝和深度測量信號連線;一芯傳輸接收脈衝;一芯作為電源連線;一芯當作地線。為了防止輸送到水面讀數裝置的發射脈衝與接收脈衝在長電纜中發生交連,擬定發射脈衝為負脈衝,接收脈衝為正脈衝。送至水面經放大、整形後,收、發脈衝均以負脈衝方式觸發雙穩態,控制測量管的導電時間,使其輸出的平均電流正比於測量的聲速值。
測量管的導通電流的峰值受電源電壓、環境溫度的影響比較大,它直接影響著聲速的測量精度,為此,擬定把測量的常通電流作為聲速測量的滿標校準電流,測量前預先作一校正,使其在短時間內,對儀器測量精度的影響降低至最小數量級。
水面讀數裝置的雙穩態觸發器增加一個-6V的電源,使之能可靠的截止或導通,同時增加二隻加速二極體,提高雙穩態的翻轉速度。
水面讀數裝置和接收放大器的輸出級均採用射極互補管輸出,使輸出波形前後沿較陡,從而提高聲速測量的線性度。為了便於維護,水上部件的電源和讀數裝置均採用外掛程式式結構,水下部件採用“O”型橡皮圈水密,使其結構簡單裝卸方便。
環鳴法聲速計
工作原理
圖2(a)和(b)是一種環鳴電路實現方案。現以圖1(a)為例說明其工作原理:
環鳴工作時,由多諧振盪器提供始鳴信號,使脈衝發射器經收發換能器發射第一個短促聲脈衝。聲脈衝在傳播中經由反射體一次反射後到達收發換能器,聲程長為L;回波一旦到達,脈衝發射器立即發射第二個短促聲脈衝;就這樣,每一次回波的到達都立即導致下一次脈衝的發射,環鳴電路因而處於周而復始的“環鳴”狀態。
環鳴電路輸出波形如圖3所示。圖3(a)為無環鳴時即振盪器處於自激振盪狀態時的輸出波形,輸出頻率約為9.1kHz;圖3(b)為環鳴時即振盪器處於受迫狀態時的輸出波形,輸出頻率就是環鳴頻率f。
暫不考慮環鳴電路的電聲延時,並設聲脈衝在聲程L(米)內以速度C(米/秒)傳播了T(秒)時間,則環鳴頻率f(1/秒)為
 聲速計
聲速計即
 聲速計
聲速計(7)式就是環鳴法測量聲速的計算公式。關於聲程L,在實施圖2兩種方案時,均設計成L=0.1米,且微量可調。當以L=0.1代入(7)式時,有
 聲速計
聲速計(8)式說明:環鳴電路輸出之環鳴頻率f(Hz)的十分之一就是聲速C(m/s);或者說:0.1秒內的環鳴次數就代表聲速C(ms/)。顯然,測量結果適於數字指示。
結構設計
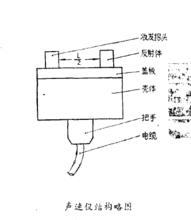 圖4
圖4圖4所示為聲速儀機械結構圖(未畫出保護罩部分)。環鳴電路板裝在尺寸為φ98mm×55mm的不鏽鋼殼體內,並在三處採用O型橡膠密封圈防漏,外引一根三芯電纜。
聲程組件是機械結構的關鍵部分。聲程組件由收發共用探頭和位置可微調的反射體組成;兩者安裝在殼體的蓋板上,間距50mm,且±1mm連續可調。關於收發探頭的設計方案見圖5。試驗和使用均已證明,收發探頭的兩種設計均能滿足環鳴電路穩定工作的要求。兩種設計均採用了φ12mm×0.4mm的壓電陶瓷換能器作為電聲轉換器件,其負極直接與被測液體接觸。
聲程設計還考慮了溫度變化對聲程L的影響。設計中,蓋板和反射體選用具有不同線脹係數的材料,以使溫度變化對聲程的影響減少至最小。
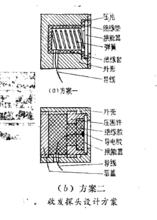 圖5
圖5