最初是SonTek公司為美國陸軍工程兵團水道實驗室設計製造的。該流速儀運用都卜勒原理,採用遙距測量的方式,對距離探頭一定距離的採樣點進行測量。如今,ADV已成為水力及海洋實驗室的標準流速測量儀器。廣泛套用於研究波浪軌跡、研究水體運動軌跡、橋樁周圍水流擾動的研究、水沙試驗測試、室內水力模型實驗、野外測量( 沼澤地小流速的測量、黃石國家公園熱噴泉水的測量、水處理廠沉澱池中的測量)、水產養殖業(水流擾動對漁業的影響)、水處理廠(用ADVOcean 測量水流的流量)、測量沼澤地中的流速、ADV研究海浪、泥沙實驗室等。
MicroADV超聲測速儀基於都卜勒效應(doppler effect)的理論。所謂都卜勒效應是為紀念奧地利物理學家都卜勒而命名的,他於1842年首先提出了這一理論,即:當波源和觀察者有相對運動時,觀察者接收到的波頻已發生改變,聲波頻率在聲源移向觀察者時變高,在聲源遠離觀察者時變低.
ADV的測量很重要參數是控制體距離發射探頭約為5cm,是一個圓柱體(體積為0.08cm3),由探頭髮射超音波,遇到控制體後反射,並由接受探頭接受反射的信號,因此,MicroADV測量的實際是控制體與發射探頭的相對運動速度。
幾何形狀:
MicroADV主要由三部分組成:量測探頭、信號調理、信號處理。量測探頭由三個10MHz的接收探頭和一個發射探頭組成, 三個接收探頭分布在發射探頭軸線的周圍,它們之間的夾角為120°,接收探頭與採樣體的連線與發射探頭軸線之間的夾角為30°,採樣體位於探頭下方5cm或10cm,這樣可以基本上消除探頭對流場的干擾。
坐標系統:
 坐標系統
坐標系統ADV採樣體:
ADV採樣體的尺寸取決於四個因素:發射聲束、接收聲束、脈衝長度、接受窗(返回信號的時間跨越周期)。右圖表示每一個因素對採樣體尺寸的影響。採樣體的水平邊界由發射聲束和接收聲束的相交部分確定,但聲束相交部分的範圍不易確定,因此把發射聲束和接收聲束近似假定為圓柱體(對於10MHz ADV,其直徑為6mm)。採樣體的垂直邊界由接收窗和脈衝長度的卷積確定。對於10MHz ADV採樣體的總高度為9mm,且採樣體的高度可隨ADV數據採集軟體中的設定改變而變化,最小高度可達1.2mm,但這樣設定會影響測量精度。另外,ADV測速點位置在採樣體的垂直中心上。
ADV速度範圍和信號強度:
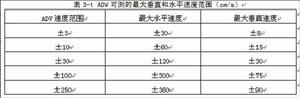 ADV速度範圍和信號強度
ADV速度範圍和信號強度信號強度是測量接受探頭接受超音波信號強度的尺度,在ADV中信號強度是用信號和噪音的比值,即信噪比SNR來衡量的。信噪比主要可以檢驗水中是否存在足夠的介質,如泥沙、微粒等,來反射聲波信號。如果水中粒子過少,返回的信號就會比周圍的噪音還要小,要是沒有足夠大的信號強度,ADV是不可能進行精確測量的,所得的數據肯定和實際差別很大。如果SNR降低,表明ADV測量中噪音很大,就會影響測量數據的精確性。對於瞬時流速測量(以25Hz採樣),信噪比一般要求大於15分貝;對於平均流速測量(以0.5Hz採樣),ADV可以在信噪比為5分貝時正常工作。
影響ADV 測試精度的主要因素:
由ADV測速原理可知,不同的聲速會對都卜勒頻移產生影響。在水中,聲速主要是溫度和水的含鹽度的函式,它們的變化將引起聲速的變化,如改變5℃的溫度,聲速將改變1%;改變1.2%的含鹽度,聲速將改變1%;如果ADV使用的聲速誤差為1%,速度測量結果的誤差將會達2%。對於由聲速變化而引起的速度測量誤差可以在後處理中修正。
另外,不同的採樣頻率和採樣體高度對ADV測速也有影響,前者對平均流速的測量影響較小,而後者的不同所得的結果波動較大,為保證精度,一般ADV採樣體高度採用9mm,採樣頻率採用25Hz。
ADV操作不當和信噪比太低都會降低ADV測試精度。
