
組成
一般說來,移動機器人的視覺系統由以下部分組成:
(1)一個或多個光信號發生器,可以是天然光信號發射器(如物體環境光線的反射光),或者是人造光信號發射器(如閃光燈、雷射光源)。
(2)用以接收構體反射光信號的一個或多個感測器(如攝像機,這種攝像機產生的圖像可以說是原始圖像,但這種感測器不一定是光學感測器,也可以是超音波感測器)。
(3)圖像採集卡,將接收的圖像轉換為計算機可以識別的二進制編碼,以便隨後進行處理。
(4)對圖像進行增強去噪,並對其中的缺陷進行清除和校正等。
(5)將變換後的圖像進行圖像存儲描述,給出必要的信息。
(6)特徵抽取,根據各種定律、算法和其他準則導出相關信息。
(7)目標識別,用來把抽取的圖像特徵與在訓練階段記錄下來的圖像特徵進行比較。識別可能是總體識別、局部識別或者零位識別。不管結果如何,機器人都必須按照識別過程的結果決定採取相應的動作。在這一階段,任何誤差都可能造成性能上的不確定性。
分類
依據視覺感測器的數量和特性,目前主流的移動機器人視覺系統有單目視覺、雙目立休視覺、多目視覺和全景視覺等。
(1)單目視覺。單目視覺系統只使用一個視覺感測器。單目視覺系統在成像過程中由於從三維客觀世界投影N維圖像上,從而損失了深度信息,這是此類視覺系統的主要缺點。儘管如此,由於單目視覺系統結構簡單、算法成熟且計算量較小,在自主移動機器人中已得到廣泛套用。如用於目標跟蹤、基於單目特徵的室內定位導航等。同時,單目視覺是其他類型視覺系統的基礎,如雙目立體視覺、多目視覺等都是在單目視覺系統的基礎上,通過附加其他手段和措施而實現的。
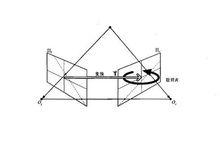 雙目立體視覺
雙目立體視覺(2)雙目立體視覺。雙目視覺系統由兩個攝像機組成,利用三角測量原理獲得場景的深度信息。並且可以重建周圍景物的三維形狀和位置,類似人眼的體視功能,原理簡單。雙目視覺系統需要明確地知道兩個攝像機之間的空間位置關係。而且場景環境的3D信息需要兩個攝像機從不同角度同時拍攝同一場景的兩幅圖像。並進行複雜的匹配才能準確得到。立體視覺系統能夠比較準確地恢復視覺場景的氣維信息,在移動機器人定位導航、避障、地圖構建等方面得到了廣泛的套用。然而,立體視覺系統中的難點是對應點匹配的問題,該問題在很大程度上制約著立體視覺在機器人領域的套用前景。
(3)多目視覺。多目視覺系統採用三個或三個以上的攝像機,三目視覺系統居多,主要用來解決雙目立體視覺系統中匹配多義性的問題,提高匹配精度。三目視覺系統的優點是充分利用了第三個攝像機的信息,減少了錯誤匹配,解決了雙目視覺系統匹配的多義性,提高了定位精度,但三目視覺系統要合理安置三個攝像機的相對位置,其結構配置比雙目視覺系統更繁瑣,而且匹配算法更複雜,需要消耗更多的時間,實時性更差。
(4)全景視覺系統。具有較大水平視場的多方向成像系統,其突出優點是具有較大的視場,可以達到360°,是其他常規鏡頭無法比擬的。全景視覺系統可以通過圖像拼接的方法或者通過折反射光學元件實現,圖像拼接的方法使用單個或多個攝像機旋轉,對場景進行大角度掃描,獲取不同方向上連續的多幀圖像,再用拼接技術得到全景圖。
套用
近十年來,隨著研究人員投入大量的研究工作,計算機視覺、機器視覺等理論不斷地發展與完善,移動機器人的視覺系統已經涉及圖像採集、壓縮編碼及傳輸、圖像增強、邊緣檢測、閾值分割、目標識別、三維重建等,幾乎覆蓋機器視覺的各個方面。目前,移動機器人視覺系統主要套用於以下三方面:
(1)用視覺進行產品的檢驗,代替人的目檢。包括:形狀檢驗,即檢查和測量零件的幾何尺寸、形狀和位置;缺陷檢驗,即檢查零件是否損壞劃傷;齊全檢驗,即檢查部件上的零件是否齊全。
(2)對待裝配的零部件逐個進行識別,確定其空間位置和方向,引導機器人的手準確地抓取所需的零件,並放到指定位置,完成分類、搬運和裝配任務。
(3)為移動機器人進行導航,利用視覺系統為移動機器人提供它所在環境的外部信息,使機器人能自主地規劃它的行進路線,迴避障礙物,安全到達目的地並完成指定工作任務。
其中前兩者屬於工業機器人的範疇,隨著技術的發展,研究人員也提出了視覺伺服的概念。而視覺導航,不論是自主、半自主,還是最早期的遙控方式,都是為完成一定的任務行為者(主體)和環境(客體)的互動過程。儘管如此,移動機器人的視覺對於移動機器人來說還沒有到達視覺相對於人類如此重要的地步,很大一部分原因是因為視覺信息處理理論與方法的不夠完善。攝像頭能在極短的時間內掃描得到數百萬上千萬計的像素的環境圖像,甚至超過了現在人類眼睛的信息採集能力,但在處理方法及處理速度上目前卻遠不能和人類相比。不過,可以相信隨著微電子技術的進步和計算機視覺的發展,移動機器人的視覺功能會越來越強大,同時機器視覺在移動機器人信息感知中所占的比重也會越來越大。
