
分類
帶有獨立定時器的測距器
 無線電測距
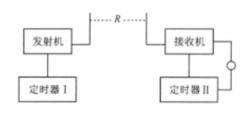
無線電測距帶有獨立定時器的測距器的工作原理如圖所示。圖中的定時器產生一個由基準振盪器形成的時間(或相位)標
準。在測距開始之前.將定時器I和定時器Ⅱ相互校對好,使其起始時間(或相位)相同。定時器I控制發射機的發射時間(或相位),當信號經過一定的傳播時間被接收機接收後,與定時器Ⅱ的時間進行比較,測量出時間差(或相位差)後即可確定電波的傳播時間r,然後按下述公式即可求得所測距離,即R=c×r。
由於這種方式是直接利用發射機輻射的信號,所以工作距離較近,適合於近距離導航參數的計算。
不帶獨立定時器的測距
不帶獨立定時器的測距器根據目標的特點可分為無源反射式和詢問回答式兩種。
(1)無源反射式測距
 無線電測距
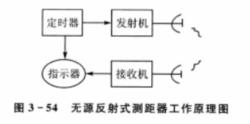
無線電測距圖為無源反射式測距器的工作原理圖。此類測距器的定時器兼有控制發射機的起始時間與測量時間間隔的基準時間兩種功能。距離計算公式為
 無線電測距
無線電測距式中,r為電波總的傳播時間。
與帶有獨立定時器的測距方式相比,由於是無源反射,因而接收到的信號強度較弱。為了保證正常工作,需要有較大的發射功率和較高的接收靈敏度。雷達測量目標的距離和在飛行器上測量距地面的相對高度多採用該方式。
詢問回答式測距
詢問回答式測距與無源反射式測距的不同之處在於,由接收機和發射機組成的回答器代替了原來的無源反射目標,而詢問器則與無源反射式測距器的組成相同。
相關設備
測距系統是無線電測量設備中實現距離測量功能的系統,它是接收機完成信號捕獲後的主要功能之一,一般稱為測距機。測距系統的發展經歷了從電子管階段、電晶體階段,到中、小規模積體電路階段,再到大規模積體電路階段和以數位訊號處理為主的數位化階段。現已逐步向功能模組化、軟體化的方向發展。測距系統的功能也從跟蹤測量單個目標,發展到不僅能對同一波束內的多個目標進行連續跟蹤,而且能對不同波束內的多個目標進行跟蹤和測量。另外,採用數位化、軟體化、模組化技術和相參積累、雜波對消、脈衝壓縮等信號處理技術,極大地提升了測距系統的測距精度和跟蹤能力。
系統舉例
用於降落階段自40km(距跑道400km)高度起到接地前的測距。無線電測距儀系統的機載部件,也就是17M900,由4台余度詢問器和4副天線組成,總重85.5kg。太空梭達到4km高度時,這些機載部件向位於拜科努爾航天發射場的6個測距設備單元(DME)發射脈衝對,然後測距設備單元通過其他頻率將脈衝對回傳至太空梭。太空梭將信號往返所需的時間轉換成其距應答機的距離。系統還可間接提供俯仰和方位數據。
地面終端中的3檯布置在跑道的一端外,另外3檯布置在跑道的另一端外。每3台終端為一組,每組中的1台終端沿跑道中線布置,距跑道中心大約20km,而另外2台則布置在跑道兩側,距跑道中心不超過60km。6台終端中的每一台都有一個唯一的編碼應答,使“暴風雪”號的Biser-4計算機可以選擇3個精度最高的終端並使用其測距值。所選擇的每一個終端每秒會被詢問60次,是當時航空標準航路中測距設備詢問頻率的近4倍。每一台終端通過2副天線進行發射,一副水平偏振,另一副垂直偏振,這樣,“暴風雪”號即使處於極端的俯仰或橫滾機動,也可通過其圓偏振天線接收到強信號。當太空梭達到4km高度時,無線電測距儀系統詢問機切換至具有微波著陸系統相同精度的測距設備單元,測距設備單元位於跑道的兩端。美國太空梭上沒有類似無線電測距儀系統的設備。
