定義
無線電是指在自由空間(包括空氣和真空)傳播的電磁波,是其中的一個有限頻帶,上限頻率在300GHz(吉赫茲),下限頻率較不統一,在各種射頻規範書,常見的有三3KHz~300GHz(ITU-國際電信聯盟規定),9KHz~300GHz,10KHz~300GHz。
無線電定位系統是通過直接或間接測定無線電信號在已知位置的固定點(岸台)與船之間傳播過程中的時間、相位差、振幅或頻率的變化,確定距離、距離差、方位等定位參數,進而用位置線確定待定點位置(如船位)的測量技術利方法。
定位系統
所用定位系統,按確定距離或距離差等定位參數的原理,分為:①脈衝式無線電定位系統,是根據無線電信號傳播時間與傳播距離成正比原理,測量船台發射脈衝信號和岸台回答脈衝信號所經歷時間間隔,求取距離或距離差;②相位式無線電定位系統,是根據無線電信號傳播中的相位變化與傳播距離成正比原理,通過測量兩連續信號的相位差求取距離或距離差;③脈衝一相位式無線電定位系統。工作方式有多種,按位置線確定方式分為:雙距離定位、雙曲線定位、雙方位定位、極坐標定位等。
雷達
雷達來自英文“無線電檢測和測距”的略語RADAR,是利用電磁波探測目標並定位的設備。它對目標發射電磁波並接收其回波,由此獲得目標到雷達的距離、徑向速度、方位和高度等信息。利用雷達對地面或海上目標定位時,是測定目標相對於雷達的距離和方位>對空中目標進行定位時,須同時測定距離、方位和高度,這種雷達稱為三坐標雷達,脈衝雷達測量目標距離時,實際是測發射脈衝間的時間差,因為電磁波以光速傳播,據此可算出目標的距離;目標的方位利用雷達天線的銳方位波束測量,目標的仰角靠窄仰角波束測量;根據所測目標的仰角和距離。就可求得目標的高度。雷達定位在軍亊上用於搜尋和引導、跟蹤測量和火力控制;民用方面可用於機場和海港管理、交通管制、氣象預報及天文研究。
無線電導航
無線電導航是利用電磁波傳播並結合運用天文、地理、海洋等有關知識,通過測定運動載體位置的有關參數以實現對船舶、飛機等運動載體的定位和導航。導航和定位是密切相關的,連續定位實質上就是導航。大多數無線電導航系統系協作式,即依靠導航台發射導航信號,使運動中的載體根據每個導航台方位以及星辰、地貌以準確判定所處的位置而進行工作。發射源大多設地面,也可裝在衛星或飛機上。賦予無線電波以導航信息的方法很多,且均以利用無線電波的恆速、直線傳播為基礎。無線電導航技術的基本要素是測角和測距,因此可以組成測角-測角、測距-測距、測角-測距和測距差(雙曲線)等系統。
(1)測角系統通過測定無線電波來向以確定運動載體與一條基準線(常用磁北基準線N)的夾角,實現定位。
(2)測距系統利用測量用戶到地面導航台間的距離來實現導航定位。測距系統有轉發、反射和測偽距三種方式。採用測偽距方式時,用戶與導航台站都配備精密時鐘,並按嚴格確定的時間輻射信號。用戶收到信號後,根據自己的時鐘確定傳播時延r,從而得到偽距ρ=cr,式中c為光速。偽距ρ中含有用戶與導航台站間的真實距離r,利用4個或4個以上時鐘相互同步的台站,測出4個或4個以上的偽距,建立4個或4個以上的方程,解方程即得到用戶的位置坐標。
(3)測距差系統是測量用戶到兩個地面台距離之差以進行,又稱雙曲線系統。測一條雙曲線位置需要使用兩個地面台,進一步的定位要用兩條位置線的交叉點,需用三個以上地面台完成。多個地面台可組成台鏈。
(4)測速系統是測量運動體的航速,這種系統以都卜勒效應為基礎,按雷達方式工作,經過積分運算取得位置坐標,用於飛行器上。
(5)多參量系統利用電磁輻射中幾個參量和幾何參量的關係進行導航定位。其中羅蘭C。系統是既利用脈衝測距差方式取得粗測數據,消除多值性,又利用連續波測相位差取得精測數據。羅蘭D導航系統和脈衝一8是其派生系統。塔康導航系統也是一種多參量導航系統,它本身是詢問應答式測距系統,又在輻射的脈衝信號上進行調幅,產生調製包絡,用包絡相位測定用戶相對於地面台的方位。塔康導航系統用求直線位置線與圓位置線交點進行定位。
為了單值地確定運動載體的位置,必須找出運動載體相對於導航台的兩條或兩條以上的位置線,兩條位置線的交點就是運動載體的位置。所謂位置線,就是對運動載體測定的某個幾何參量(如夾角、距離、距離差等)具有同樣數值的點的軌跡。最常見的位置線有直線、圓和雙曲線等。如圖所示。
直線位置線,即等方位線,它與通過導航台或運動載體的參考方向保持不變,對於導航台A,運動載體M的方位為aM,對於運動載體M,導航台的方位為aA,AM就是一條等方位的直線位置線,如圖1(a)所示。
與導航台保持恆定距離的位置線是一個以導航台為中心的圓位置線,如圖1(B)所示,R為常數。從運動載體M測量到兩個導航台A、B的距離差Rd,Rd保持
A、B導航台M運動載體
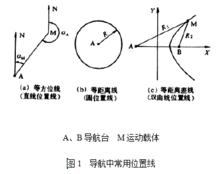 無線電定位系統
無線電定位系統恆值的等距離差線是一條雙曲線位置線,如圖1(c)所示。
等方位位置線與等距離位置線相交的定位法稱為ρ―Θ定位法(如塔康導航系統)。等距離位置線與等距離位置線相交的定位法稱為ρ-ρ定位法。雙曲線位置線與雙曲線位置線相交的定位法稱為雙曲線定位法(如台卡、羅蘭c和奧米加等導航系統)。
全球定位系統(GPS)
美國和蘇聯先後發展了類似的系統。全稱為“導航星”授時和測距全球定位系統。它可以實時和全天候地為全球範圍從地面到9000km高空的任一物體提供高精度的三維位置、三維速度和時間信息。GPS系統由空間(衛星)、地面監控和用戶接收機三大部分組成。空間部分有18顆(或21顆)高度為2萬公里的導航衛星,運轉在6個傾角為55°的圓軌道平面上,每面相隔60°,軌道周期為12h,保證在地球上任一地點任一時刻均能看到4顆以上仰角大於5°的衛星,每顆導航星上均載有穩定度為10-13/日的原子鐘,這是GPS之所以能精確定位、授時的基礎。每個衛星以L頻段的兩個頻率連續傳送導航信號,並採用擴頻技術來提高抗干擾能力。這兩個信號分別稱為粗測碼(C/A碼)和精測碼(P碼)。前者可供民用,定位25m以內;後者專供軍用,定位精度在1~10m內。兩種信號均含有可向用戶接收機提供所需的衛星情況、系統時間、接收機正在跟蹤的衛星的星曆(目前和將來的位置)等信息。
控制部分由一個主控站和分布的五個監控站組成,各監控站測出衛星位置、速度和時間數據以及各站的大氣參數,送往主控站,後者經數據處理後得到各星的星曆、星鍾偏差和電離層延時等數據,然後每隔12h注入衛星一次,更新星上的數據。
 無線電定位系統
無線電定位系統 無線電定位系統
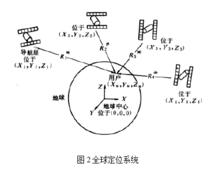
無線電定位系統全球定位系統如圖2所示。用戶接收機能同時從4顆衛星接收到由星鍾驅動的測距碼,測出由星到接收機的延時т1,т2,т3,т4,然後算出用戶到每顆星的偽距。
 無線電定位系統
無線電定位系統i=1,2,3,4
偽距與衛星和用戶坐標及時鐘差的關係為
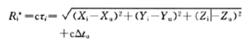 無線電定位系統
無線電定位系統式中c為光速;△tu為用戶時鐘誤差、xiYiZi是第i顆衛星的坐標,由導航信息提供。據此可求解×u、Yu、Zu和△tu(×uYuZu),是以地心為原點的用戶直角坐標,可再轉換成常用的經緯度和高度。
GPS系統除廣泛用於軍事方面外,在航空、航海、勘探、測繪、地球物理及旅遊等方面也有套用。
