
背景
模糊控制
模糊控制器根據語言規則對輸入信息進行模糊推理得到控制器輸出。模糊控制系統對具有高度非線性、藕合嚴重、沒有明確的數學模型、環境因素大和具有較大時延及時變特性的對象的控制均優於直接數學控制系統,但它在動態回響及穩定性能方面存在一定的缺陷,還沒有有效的數學方法用於模糊控制器的穩定性研究,只能用經驗和實驗來解決這個問題。主要有兩個方面:
(1)控制系統在負正誤差“超大”(例如:起動不久或有較大擾動發生)的情況下,由於偏差變化量的影響,使系統在控制查詢表中所選擇的輸出值不屬於兩極性質,這時實際的控制輸出就不能使系統快速跟蹤給定值;
(2)由於模糊控制器的量化作用,當實際偏差不等於零,而E=0時,控制器不作調整,這樣就產生一定寬度的死區,導致穩態誤差的存在,並且在工作點附近容易產生小範圍的振盪。
針對模糊控制器的缺陷,為了改善系統動態回響和提高穩定性,提出滑模變結構的模糊控制器。
滑模控制
滑模控制是一種非連續控制,只需估計干擾的界限而無需測定其具體值,可將被控對象從任意位置控制到滑動曲面上仍保持系統的穩定性和魯棒性,並且容易實現,或者說,滑模控制系統對系統參數和外部擾動的不變性是其突出的優點。然而,滑模控制在本質上的不連續開關特性將會引起系統的顫動,這種顫動可能把系統中存在的未建模高頻成分激勵起來,甚至使系統不穩定。同時,顫動也增加了控制器的負擔,易損壞控制器的部件。
在常規滑模控制中,大多數控制設計是基幹系統模型利用數學工具來解決的。然而在現實世界中,許多複雜的工業過程的精確的數學模型是得不到的或難以明確地表達。通過結合專家經驗的語言信息,模糊控制能夠有效地控制這些具有非線性、參數變化和干擾的複雜系統。
方法
模糊滑模控制FSMC(Fuzzy Sliding Mode Control)方法指將模糊控制和滑模控制的方法二者的優點相結合。FSMC可以不依賴系統的模型,保持了常規模糊控制的優點,同時FMSC又可以減弱單純滑動模態控制系統存在的抖振。因此,FSMC是在不確定環境下,對於難於建模的複雜對象進行有效控制的一種智慧型控制方法。
將模糊控制和傳統的滑模控制相結合,在模糊滑模控制器中用模糊控制的輸出代替滑模控制中的符號項,平滑了控制信號,從而抑制了滑模控制系統中所固有的顫抖現象。具體實現是將切換函式模糊化為單吊項,採用 Larsen 的積模糊蘊含規則,非模糊化決策採用重心法,推導出模糊控制器輸出的解析表達式。
意義
對常規模糊控制
模糊滑模控制器(FSMC)相對於常規模糊控制的變化具有兩個方面的重要意義:
(1)控制目標從跟蹤誤差轉為滑模函式,只要施加控制使滑模函式s為零,則跟蹤誤差將漸進到達零點;
(2)是對於n >2的高階系統,模糊滑模控制具有簡化模糊控制系統結構複雜性的作用。對於n>2的高階系統,在常規模糊控制器中輸入量應包括e以及e的直到n-1階導數,輸入量大;而FMSC的輸入是二維的就已經將各階導數包含在其中,而且這種“信息融合”是按照滑模原理而不是其他什麼主觀原則進行的。
對滑模控制
對滑模控制而言,FSMC 的意義則在於它柔化了控制信號,減輕或避免了一般滑模控制的抖振現象。
優點
把滑模變結構控制與模糊控制相結合可以綜合二者的優點:
(1)由滑模變結構控制保證系統穩定性,且使滑動模態具有良好動態;
(2)由模糊控制器調整模糊運動段特性以減弱抖振:在系統狀態點遠離切換線時,加大控制作用,使ds/dt較大,加快模糊運動段的回響速度;
(3)在系統狀態點接近切換線時適當減小控制作用,防止系統狀態點以過大速度沖向切換線;
(4)適當調整模糊控制器的特性,可以給出合適的控制力度,使系統既具有快速性,又能減弱抖振。
將滑動模態的概念引入到模糊控制器的設計中,用滑模控制的到達條件來系統地決定模糊控制的規則。可以讓模糊控制系統的動態行為被人為定義的滑動面標明和支配,並且通過將系統的狀態變數與一個滑動變數相聯繫,可將MIS0模糊控制器轉化為一個SIS0模糊控制器,從而降低了輸入空間的維數和模糊規則的數量。大多數有關模糊滑模控制的工作主要是套用模糊邏輯來設計滑模控制器。利用模糊集理論按照滑模控制的原理來構造控制規則,可以削弱了抖振現象,同時保證了模糊系統的穩定性。
結合方式
模糊滑模控制主要有以下五種結合方式:
(1)通過模糊控制調節符號函式項或者飽和函式項,這種方式較好地選擇切換係數以保證減小趨近速度和抖動。但靠其推導出來的趨近律參數由於常規模糊邏輯本身存在精度問題並不十分精確。
(2)通過模糊控制補償或者直接確定滑模控制量,它以切換函式及其微分為輸入量,通過模糊推理獲得滑模控制的控制量。此法易實現也能保證系統的穩定性,同時具有很強魯棒性。
 滑模模糊控制
滑模模糊控制(3)從系統化地構造模糊控制器的觀點出發,根據滑模系統滑動模的到達條件作為準則生成模糊滑動控制器模糊滑模控制的規則庫。還可以在輸出上選定為增量式的控制量模糊值 ,根據上述準則直接產生決策表。
(4)用模糊控制來辨識模型的未知部分,通常這種方法和自適應控制相結合。此模糊系統的輸入有兩類:其一為系統的綜合偏差模糊值,其二為偏差增量模糊值,而輸出即為對切換係數的模糊估值。還有就是用模糊控制來解決非線性系統中的不確定項。
(5)滑模控制、模糊控制的複合控制策略。就是在大偏差時採用滑模控制,在小偏差時採用模糊控制的運行方式。由於在小偏差時己不使用滑模控制,因此從根本上避免了抖動現象的存在;而在大偏差時使用滑模控制又保證了趨近速度,同時避免了運用模糊邏輯推導趨近律參數所造成的精度問題。
算法間的區別
總結各種不同的模糊滑模控制算法,主要不同的是在模糊控制器的輸入量的選擇方面。不同專家提出了不同的方法,用的較多的是單輸入單輸出和二輸入單輸出。單輸入單輸出模糊控制器就是把切換線S不同取值建立控制作用,進行模糊控制。二輸入單輸出的模糊控制器在系統狀態點滿足切換邊界層的範圍內建立控制作用改變的模糊控制機制。在相平面上作與切換線L1、L2平行且通過平衡點(0,0)的切換線f,作與切換線Ll、L2垂直的且通過平衡點(0,0)的直線d。由於狀態點到直線d和S=0的距離表示了狀態點到原點的遠近,控制系統根據狀態點在相平面上所處的位置來改變控制作用時間的大小,接近平衡點的區域採用小的控制時間,這樣可以使系統的相軌跡較準確地趨近於平衡點;遠離平衡點的區域採用較大的控制時間,加快系統趨近於平衡點的時間,提高系統的回響時間。二輸入單輸出的模糊控制器也有把輸入量選擇為切換線s以及s的導數。
典型
直 接型模糊滑模控制器
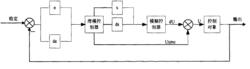 圖1 直接型模糊滑模控制器框圖
圖1 直接型模糊滑模控制器框圖直接型模糊滑模控制算法就是通過滑模控制對偏差和偏差微分進行切換,同時對切換函式和切換函式微分模糊化,經過模糊推理和解模糊化後,得到模糊控制器,最後得到輸出的控制量對對象進行控制。其控制器結構框圖示意如圖1。
選擇型模糊滑模控制器
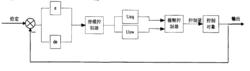 圖2 選擇型模糊滑模控制框圖
圖2 選擇型模糊滑模控制框圖 滑模模糊控制
滑模模糊控制 滑模模糊控制
滑模模糊控制在滑模控制器中,控制律通常由等效控制和切換控制組成。等效控制將系統狀態保持在滑模面上,切換控制迫使系統狀態在滑模面上滑動。選擇型模糊滑模控制器(如圖2)就是利用模糊規則有效選擇等效控制和切換控制,建立基於這種規則建立的模糊控制器,從而控制系統對象。
