
測深設備
正文
測量水深的航海儀器,也是進行水道測量所必備的工具。測深錘 源於原始的水深測量工具測深桿(俗稱花桿)。把測深桿垂直插入水中觸及水底,觀測桿上的深度標記即可得知測點的水深。測深桿僅適用於淺水水域。用系鉛錘的繩索代替竹竿,繩索上以不同顏色的標記表示深度,稱為測深錘,又稱水砣,沿用至今已有2000年的歷史。在船舶上,測深錘一般適用於測量30米內的水深,當船舶靜止時,可達60米。
機械測深機 1878年,W.湯姆森根據水深與壓力成正比的原理,製成機械測深機。它在接近鉛錘處的鋼索上繫上測深玻璃管,內塗遇海水變色的化學品,開口端向下,當鉛錘觸及海底時,在水壓作用下,海水進入管內,根據玻璃管變色的長度,可知水深。它的測量深度可達180米左右,但誤差較大,且受航速和氣象條件的影響。
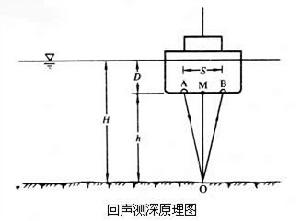
回聲測深儀 1918年,法國物理學家P.郎之萬利用聲波在水中傳播的速度基本恆定的特性,發明了回聲測深儀。這種儀器測量速度快,準確度高,可在極短的時間內,連續得到多測點的深度,基本上達到聯點成線的要求,可進行線測深。
回聲測深儀是目前測量水深使用最廣的一種設備,由發射器、發射換能器、接收換能器、接收器、顯示器和電源裝置組成。顯示器按顯示水深的方式,分為指針式、閃光式、記錄式、數字式和圖象式等。一部回聲測深儀可具有一種或數種顯示方式。為確保船舶安全航行和便於讀取水深,顯示器部分可增設淺水警報裝置和換能器深度修正裝置。聲波在水中傳播是有損耗的。因此船用回聲測深儀的工作頻率、最小作用深度和最大作用深度等技術指標,應視測深儀的測量使用範圍而異。通常,工作頻率選取在14~200kHz左右(深水用低檔,淺水用高檔)。高頻最小作用深度可達0.1~0.3米;低頻最大作用深度可達萬米。
 測深設備
測深設備

1963年,S.F.A.弗倫特霍爾茲利用從船舷伸出的托架,安裝了25個換能器,對海底進行成片測深,這是面測深技術的開端。70年代,法國研製成多波束回聲測深儀,可以同時測量十幾條線的水深數據,使面測深技術有了發展。1973年芬蘭建造的“艾里斯托”號測量船,安裝有回聲掃描系統,聲掃描的寬度為40米,通過測量信息處理機和計算中心,可迅速測量出海底深度和繪製出海圖,使測深技術達到新的高度。
