
研發背景
 汽車自適應前照燈系統
汽車自適應前照燈系統傳統的前照燈系統是由:近光燈、遠光燈、行駛燈和前霧燈組合而成。在城市道路行駛並且限速的情況下,主要採用近光;在鄉間道路或者高速公路上高速行駛的時候,主要採用遠光;霧天行駛的時候,應該打開霧燈;白天行駛,應該打開行駛燈(歐洲標準)。但是實際的使用中,傳統的前照燈系統存在著諸多問題。例如,現有近光燈在近距離上的照明效果很不好,特別是在交通狀況比較複雜的市區,經常會有很多司機在晚上將近光燈、遠光燈和前霧燈統統打開;車輛在轉彎的時候也存在照明的暗區,嚴重影響了司機對彎道上障礙的判斷;車輛在雨天行駛的時候,地面積水反射前燈的光線,產生反射眩光等等。
歐洲汽車照明研究機構曾經就此作過做專項調查,結果顯示,歐洲司機們最希望改善的是陰雨天氣積水路面的照明,排在第二位的是鄉村公路的照明,接下來依次是彎道照明、高速公路照明和市區照明。
上述這些問題的存在,就使得研製一種具有多種照明功能的前照燈成為必要,並且這些功能的切換,出於安全上的考慮,必須是自動實現的。所以歐洲和日本相繼研製了這種自動適應車輛行駛狀態的前照燈系統——AFS(自適應前照燈系統)。
功能簡介
陰雨天氣的照明:
陰雨天氣,地面的積水會將行駛車輛打在地面上的光線,反射至對面會車司機的眼睛中,使其目眩,進而可能造成交通事故。AFS有效的解決方法是:前燈發出如圖所示的特殊光型,減弱地面可能對會車產生眩光的區域的光強。
轉彎道路的照明:
傳統前燈的光線因為和車輛行駛方向保持著一致,所以不可避免的存在照明的暗區。一旦在彎道上存在障礙物,極易因為司機對其準備不足,引發交通事故。AFS解決的方法是:車輛在進入彎道時,產生旋轉的光型,給彎道以足夠的照明
高速公路的照明:
車輛在高速公路上行駛,因為具有極高的車速,所以需要前照燈比鄉村道路照得更遠,照得更寬。而傳統的前燈卻存在著高速公路上照明不足的問題,如圖5所示。AFS採用了更為寬廣的光型解決這一問題。
城市道路的照明:
城市中道路複雜、狹窄。傳統前照燈近光如圖7所示,因為光型比較狹長,所以不能滿足城市道路照明的要求。AFS在考慮到車輛市區行駛速度受到限制的情況下,可以產生比較寬闊的光型,有效地避免了與岔路中突然出現的行人、車輛可能發生的交通事故。
功能原理
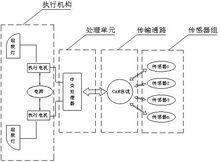
AFS是一個由感測器組、傳輸通路、處理器和執行機構組成的系統。由於需要對多種車輛行駛狀態做出綜合判斷,客觀上決定了AFS是一個多輸入多輸出複雜的系統。圖1是德國HELLA公司AFS的系統簡圖
要實現不同的功能,AFS必須要從不同的感測器取得不同的車輛行駛信息。比如,為了實現彎道旋轉照明的功能,除了要從車速感測器獲取車速、方向盤角度感測器獲取方向盤轉角、車身高度感測器獲得車身傾斜角度以外,還必須通過一些特殊的感測器,獲取車輛實際轉向角度的信息;為了實現陰雨天照明的功能,就要從濕度感測器獲得是否陰雨的信息……
因為在通常的情況下,AFS所需獲得部分信息也被其他的控制系統採用,即AFS實際上要和其他的系統共用一些感測器,所以,必須通過匯流排這一傳輸通路以後,才能實現這些感測器信息的共享。
AFS接受到的信息,除了車速,車身轉角和車身傾斜角等等少數信息是可以定量的以外,其他感測器發回的信息大多只能到定性的程度。諸如,地面平不平,雨下得大不大等等車身之外的環境信息,都是不能精確量化的。這就使得AFS的中央處理器能夠進行模糊的判斷。並且很多信息之間是相互關聯的。比如,在陰雨天氣,路面積水的情況下,車輛的轉角和晴天相比有極大的差異……AFS的中央處理器不僅要做模糊的判斷,而且還要隨著這種環境的改變不斷的修整系統參數,這使得AFS最終成為一個自適應的模糊系統。
AFS的執行機構是由一系列的馬達和光學機構組成的。一般有投射式前照燈,對前燈垂直角度進行調整的調高馬達,對前燈水平角度進行調整的旋轉馬達,對基本光型進行調整的可移動光柵,此外還有一些附加燈如角燈等等。
目前已經有不少豪華車,諸如BMW5系、賓士E級、奧迪A8、凌志R系列等等,開始加裝AFS系統。最近有訊息說在天津投產的TOYOTA的MARK2也要安裝AFS。相形見絀的是,國內現在對AFS的研發還處在萌芽狀態,恐怕在這新的一輪汽車照明革命的浪潮中,不得不又處於非常不利的地位!
