作者:李躍松 南京航空航天大學機電學院
注|:上接“兩自由度機械手”
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
此機械手的控制可以採用對時間採樣,得到一系列點(x,y),然後求出所需的一系列轉角 (th1,th2),只要對電機進行轉角控制就能很好的按規劃的路逕行走。
2,MATLAB對行走軌跡是直線就行仿真:
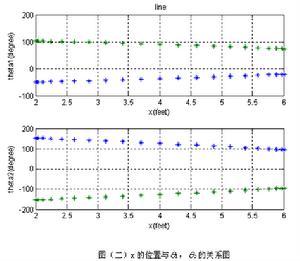
機械手從(6,3)按直線運動到(2,1)所用時間是2s,且L1=5,L2=5,可以求得,
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
圖(二)為x的位置與 th1,th2的關係圖,圖中兩條線上面一條為L2向上時的th1,th2的值;
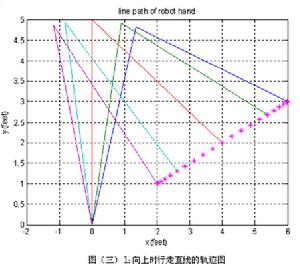
下面正向求解對所得結果驗證,驗證結果如圖(三)。由圖我們可以看出,結果基本與理論期望相同;
3,MATLAB對行走軌跡是圓弧就行仿真:
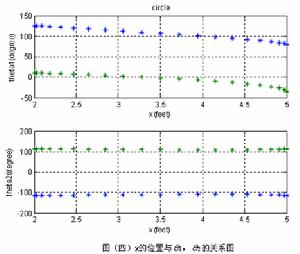
機械手從(5,2)按圓弧運動到(2,5)半徑為3,所用時間是2s,且L1=5,L2=5,可以求得
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
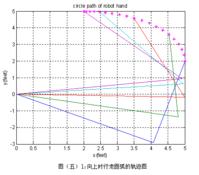
圖(四)為x的位置與th1 ,th2的關係圖,圖中兩條線上面一條為L2向上時的th1,th2的值;(程式1)。下面正向求解,對所得結果驗證,驗證結果如圖(五),由圖我們可以看出,結果基本與理論期望相同(程式2);
5,套用與推廣:
直線運動可以用來焊接、搬運物品、圓弧運動用來繞過障礙物;如果在O點再加個繞y軸旋轉的電機,則此機械手可以在空間裡走直線和圓弧。
6,控制:
此機械手可以採用對三個電機旋轉角度精確控制來實現對機械手位置和運動路徑的控制,而電機所應旋轉的角度和速度的控制由控制計算機來完成。
為了精確控制電機,可以用速度環、位置環,與PID結合進行控制。