
基於 matlab 的 2R 機械手路徑規劃與仿真
作者:李躍松 南京航空航天大學機電學院
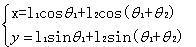
2R機械手如圖(一),在O點,臂l1和l2的交點處各有一個電機,分別控制了l1與x軸,l2與l1軸之間的夾角 和 。
圖(一) 2R機械
 兩自由度機械手
兩自由度機械手由上圖可以的關係式:
1 ,三次樣條函式:
假設x的位置有t0時刻的x0運動到tf時刻的xf,x在運動前後速度都為0;採用三次多項式樣條函式,路徑表示為:
 兩自由度機械手
兩自由度機械手 兩自由度機械手
兩自由度機械手速度表達式可以用x的導數表達為:
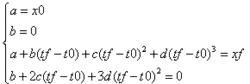
位置和速度必須滿足下列邊界條件,即
在t0時刻
 兩自由度機械手
兩自由度機械手在tf時刻
 兩自由度機械手
兩自由度機械手把邊界條件代入路徑和速度的表達式得,
 兩自由度機械手
兩自由度機械手從而解得,
 兩自由度機械手
兩自由度機械手代入路徑表達式得,路徑為:
 兩自由度機械手
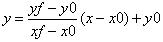
兩自由度機械手下面就路徑為直線就行研究:
若路徑為直線y的運動滿足下面關係式:
 兩自由度機械手
兩自由度機械手對圖(一)機械手求逆向運動學方程,
請搜“ 兩自由度機械手2”
